
Lecture Notes in Mathematics 2214
Saeed Zakeri
Rotation Sets
and Complex
Dynamics
Lecture Notes in Mathematics 2214
Editors-in-Chief:
Jean-Michel Morel, Cachan
Bernard Teissier, Paris
Advisory Board:
Michel Brion, Grenoble
Camillo De Lellis, Zurich
Alessio Figalli, Zurich
Davar Khoshnevisan, Salt Lake City
Ioannis Kontoyiannis, Athens
Gábor Lugosi, Barcelona
Mark Podolskij, Aarhus
Sylvia Serfaty, New York
Anna Wienhard, Heidelberg
Saeed Zakeri
Rotation Sets and Complex
Dynamics
123
Saeed Zakeri
Department of Mathematics
Queens College of CUNY
Queens, NY
USA
Department of Mathematics
Graduate Center of CUNY
New York, NY
USA
ISSN 0075-8434 ISSN 1617-9692 (electronic)
Lecture Notes in Mathematics
ISBN 978-3-319-78809-8 ISBN 978-3-319-78810-4 (eBook)
https://doi.org/10.1007/978-3-319-78810-4
Library of Congress Control Number: 2018939069
Mathematics Subject Classification (2010): 37E10, 37E15, 37E45, 37F10
© Springer International Publishing AG, part of Springer Nature 2018
This work is subject to copyright. All rights are reserved by the Publisher, whether the whole or part of
the material is concerned, specifically the rights of translation, reprinting, reuse of illustrations, recitation,
broadcasting, reproduction on microfilms or in any other physical way, and transmission or information
storage and retrieval, electronic adaptation, computer software, or by similar or dissimilar methodology
now known or hereafter developed.
The use of general descriptive names, registered names, trademarks, service marks, etc. in this publication
does not imply, even in the absence of a specific statement, that such names are exempt from the relevant
protective laws and regulations and therefore free for general use.
The publisher, the authors and the editors are safe to assume that the advice and information in this book
are believed to be true and accurate at the date of publication. Neither the publisher nor the authors or
the editors give a warranty, express or implied, with respect to the material contained herein or for any
errors or omissions that may have been made. The publisher remains neutral with regard to jurisdictional
claims in published maps and institutional affiliations.
Printed on acid-free paper
This Springer imprint is published by the registered company Springer International Publishing AG part
of Springer Nature.
The registered company address is: Gewerbestrasse 11, 6330 Cham, Switzerland
Preface
For an integer d ≥ 2, let m
d
: R/Z → R/Z denote the multiplication by d map
of the circle defined by m
d
(t) = dt (mod Z).Arotation set for m
d
is a compact
subset of R/Z on which m
d
acts in an order-preserving fashion and therefore has
a well-defined rotation number. Rotation sets for the doubling map m
2
seem to
have first appeared under the disguise of Sturmian sequences in a 1940 paper of
Morse and Hedlund on symbolic dynamics [17] (the equivalence with the rotation
set condition was later shown by Gambaudo et al. [10] and Veerman [28]). Fertile
ground for their comeback was provided half a century later by the resurgence
of the field of holomorphic dynamics. For example, in the early 1990s Goldberg
[11] and Goldberg and Milnor [12] studied rational rotation sets in their work on
fixed point portraits of complex polynomials. The main result of [11] was later
extended by Goldberg and Tresser to irrational rotation sets [13]. Around the same
time, Bullett and Sentenac investigated rotation sets for the doubling map and their
connection with the Douady–Hubbard theory of the Mandelbrot set [7](seeFig.1
for an illustration of this link). Aspects of this work were generalized to arbitrary
degrees a decade later by Blokh et al. who in particular gave recipes for constructing
a rotation set for m
d+1
from one for m
d
and vice versa [2]. More recently, Bonifant,
Buff, and Milnor used rotation sets for the tripling map m
3
in their work on antipode-
preserving cubic rational maps [4]. In an entirely different context, rational rotation
sets appear in McMullen’s study of the space of proper holomorphic maps of the
unit disk [19]; they play a role analogous to simple closed geodesics on compact
hyperbolic surfaces.
This monograph presents the first systematic treatment of the theory of rotation
sets for m
d
in both rational and irrational cases. Our approach, partially inspired
by the ideas in [4], has a rather geometric flavor and yields several new results on
the structure of rotation sets, their gap dynamics, maximal and minimal rotation
sets, rigidity, and continuous dependence on parameters. This “abstract” part is
supplemented with a “concrete” part which explains how rotation sets arise in the
dynamical plane of complex polynomial maps and how suitable parameter spaces of
such polynomials provide a complete catalog of all rotation sets of a given degree.
v
vi Preface
5
/
31
9
/
31
10
/
31
18
/
31
20
/
31
+
1
/
2
5
/
31
9
/
31
10
/
31
18
/
31
20
/
31
+
1
/
2
=
2
/
5
=
(
√
5
−
1
)
/
2
0
0
ω
ω
ω
ω
θθ
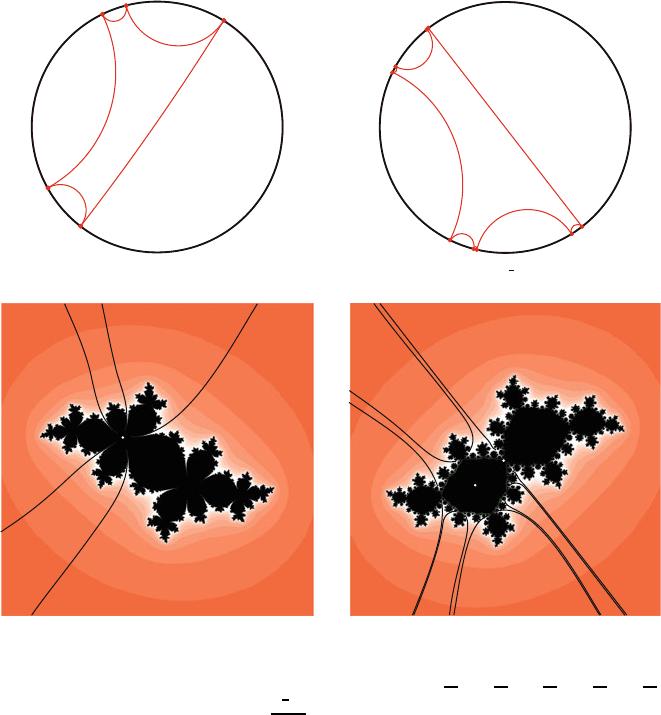
Fig. 1 For each 0 ≤ θ<1 the doubling map t → 2t(mod Z) has a unique minimal invariant
set X
θ
⊂ R/Z of rotation number θ which is a period orbit if θ is rational and a Cantor set
otherwise. Top left: The case θ = 2/5whereX
θ
is the 5-cycle
5
31
→
10
31
→
20
31
→
9
31
→
18
31
.
Top right: The golden mean case θ =
√
5−1
2
where the Cantor set X
θ
is the closure of the orbit
of ω ≈ 0.35490172 .... According to Douady and Hubbard, the “rotation set” X
θ
is related to the
external rays of the corresponding quadratic map z → e
2πiθ
z + z
2
(shown in the bottom row) as
well as the parameter rays that land on the boundary of the main cardioid of the Mandelbrot set.
See Sect. 5.3 for details
Here is an outline of the material presented in this monograph:
Chapter 1 provides background material on the dynamics of degree 1 monotone
maps of the circle. Given such a map g : R/Z → R/Z, its Poincaré rotation
number ρ(g) is constructed using a Dedekind cut approach that quickly leads
to basic properties of the rotation number and how it essentially determines the
asymptotic behavior of the orbits of g. These orbits converge to a cycle if ρ(g)
is rational and to a unique minimal Cantor set if ρ(g) is irrational. A key tool in
understanding this dichotomy is the semiconjugacy between g and the rigid rotation
r
θ
: t → t + θ(mod Z) by the angle θ = ρ(g). This semiconjugacy is also utilized
Preface vii
in studying the existence and uniqueness of invariant probability measures for g:
If ρ(g) is rational, every such measure is a convex combination of Dirac measures
supported on the cycles of g, while if ρ(g) is irrational, there is a unique invariant
measure supported on the minimal Cantor set of g.
Chapter 2 introduces rotation sets for the map m
d
and develops their basic
properties. A rotation set for m
d
is a non-empty compact set X ⊂ R/Z, with
m
d
(X) = X, such that the restriction m
d
|
X
extends to a degree 1 monotone map
of the circle. The rotation number of X, denoted by ρ(X), is defined as the rotation
number of any such extension. We refer to X as a rational or irrational rotation
set according as ρ(X) is rational or irrational. Understanding X is facilitated by
studying the dynamics of the complementary intervals of X called its gaps.A
gap I is labeled minor or major according as m
d
|
I
: I → m
d
(I ) is or is not a
homeomorphism, and the multiplicity of I is the number of times the covering map
m
d
wraps I around the circle. Counting multiplicities, X has d − 1 major gaps,
a statement reminiscent of the fact that a degree d polynomial has d − 1 critical
points. Major gaps completely determine a rotation set and the pattern of how they
are mapped around can be recorded in a combinatorial object called the gap graph.
Next, we study maximal and minimal rotation sets. Maximal rotation sets for
m
d
are characterized as having d − 1 distinct major gaps of length 1/d.A
rational rotation set may well be contained in infinitely many maximal rotation sets.
By contrast, we show that an irrational rotation set for m
d
is contained in at most
(d − 1)! maximal rotation sets. Minimal rotation sets are cycles in the rational case
and Cantor sets in the irrational case. We prove that a rational rotation set contains
at most as many minimal rotation sets as the number of its distinct major gaps. As
a special case, we recover Goldberg’s result in [11] according to which a rational
rotation set for m
d
contains at most d −1 cycles. On the other hand, every irrational
rotation set is easily shown to contain a unique minimal rotation set.
Chapter 3 offers a more in-depth study of minimal rotation sets by presenting a
unified treatment of the deployment theorem of Goldberg and Tresser. Suppose X
is a minimal rotation set for m
d
with the rotation number ρ(X) = θ = 0. Then
X is a q-cycle (i.e., a cycle of length q)ifθ = p/q in lowest terms and a Cantor
set if θ is irrational. The natural measure on X is the unique m
d
-invariant Borel
probability measure μ supported on X.Thecanonical semiconjugacy associated
with X is a degree 1 monotone map ϕ : R/Z → R/Z, whose plateaus are precisely
the gaps of X, which satisfies ϕ ◦ m
d
= r
θ
◦ ϕ on X. It is related to the natural
measure by ϕ(t) = μ[0,t] (mod Z). The covering map m
d
has d − 1 fixed points
u
i
= i/(d − 1)(mod Z).Thedeployment vector of X is the probability vector
δ(X) = (δ
1
,...,δ
d−1
) where δ
i
= μ[u
i−1
,u
i
). Note that qδ(X) ∈ Z
d−1
if θ is
rational of the form p/q.
The deployment theorem asserts that given any θ and any probability vector δ ∈
R
d−1
that satisfies qδ ∈ Z
d−1
if θ = p/q, there exists a unique minimal rotation
set X = X
θ,δ
for m
d
with ρ(X) = θ and δ(X) = δ. The rational case of this
theorem that appears in [11] and its irrational case proved in [13] are treated using
very different arguments. By contrast, we provide a proof that reveals the nearly

viii Preface
identical nature of the two cases. The key tool in our unified treatment is the gap
measure
ν =
d−1
i=1
∞
k=0
d
−(k+1)
1
σ
i
−kθ
,
where σ
i
= δ
1
+···+δ
i
and 1
x
denotes the unit mass at x.Thisisanatomic
measure supported on the union of at most d − 1 backward orbits of the rotation
r
θ
. The general idea is that the gap measure can be used to construct the “inverse”
of the canonical semiconjugacy of X and therefore X itself. This measure makes
a brief appearance in an appendix of [13], but its real power is not nearly utilized
there. In addition to its theoretical role, the gap measure turns out to be a highly
effective computational gadget.
Chapter 3 also includes a fairly detailed discussion of finite rotation sets, namely,
unions of cycles that have a well-defined rotation number. Let C
d
(p/q) denote the
collection of all q-cycles under m
d
with rotation number p/q. According to the
deployment theorem, C
d
(p/q) can be identified with a finite subset of the simplex
Δ
d−2
={(x
1
,...,x
d−1
) ∈ R
d−1
: x
i
≥ 0and
d−1
i=1
x
i
= 1} with
q+d−2
q
elements. A collection of cycles in C
d
(p/q) are compatible if their union forms
a rotation set. In [19], McMullen proposes that C
d
(p/q) can be identified with
the vertices of a simplicial subdivision Δ
d−2
q
of Δ
d−2
, where each collection of
compatible cycles corresponds to the vertices of a simplex in Δ
d−2
q
. We provide
a justification for this geometric model; in particular, for each x ∈ Δ
d−2
our
proof gives an explicit algorithm for finding a simplex in Δ
d−2
q
that contains x.
The subdivision Δ
d−2
q
is different from (and in a sense simpler than) the standard
barycentric subdivision and could perhaps be of independent interest in applications
outside dynamics.
In Chap.4, we give sample applications of the results of Chaps. 2 and 3,
especially the deployment theorem. For example, we show that every admissible
graph without loops can be realized as the gap graph of an irrational rotation set.
We also study the dependence of the minimal rotation set X
θ,δ
on the parameter
(θ, δ). We prove that the map (θ, δ) → X
θ,δ
is lower semicontinuous in the
Hausdorff topology, and it is continuous at some parameter (θ
0
,δ
0
) if and only
if X
θ
0
,δ
0
is exact in the sense that it is both minimal and maximal. We provide a
characterization of exactness which shows that the set of such parameters has full
measure in (R/Z) × Δ
d−2
.
As another application, we use the gap measure to compute the leading angle ω
of X = X
θ,δ
, that is, the smallest angle when X is identified with a subset of (0, 1):
ω =
1
d − 1
ν(0,θ]+
N
0
d − 1
=
1
d − 1
d−1
i=1
0<σ
i
−kθ≤θ
d
−(k+1)
+
N
0
d − 1
.

Preface ix
Here, N
0
≥ 0 is the number of indices i with σ
i
= 0. The formula gives an explicit
algorithm for computing the base-d expansion of the angle (d − 1)ω, which has
an itinerary interpretation in the context of polynomial dynamics. We exploit the
leading angle formula in the low-degree cases d = 2andd = 3tocarryouta
detailed analysis of the structure of minimal rotation sets under the doubling and
tripling maps.
Chapter 5 explores the link between rotation sets and complex polynomial maps.
After a brief review of the basic definitions in polynomial dynamics, we explain
how an indifferent fixed point of a polynomial of degree d determines a rotation set
under m
d
. More precisely, the angles of the dynamic rays that land on a parabolic
point or on the boundary of a “good” Siegel disk define a rotation set X with
ρ(X)=θ,wheree
2πiθ
is the multiplier of the parabolic point or the center of the
Siegel disk. In the parabolic case, this statement is well known and goes back to the
work of Goldberg and Milnor [12]. The Siegel case, while similar in spirit, is trickier
because of the possibility of rays accumulating but not landing on the boundary. The
“good” Siegel disk assumption refers to a limb decomposition hypothesis, similar
to Milnor’s in [22], which allows us to prove the required landing statements (this
hypothesis is weaker than local connectivity of the Julia set and presumably holds
for Lebesgue almost every θ). The deployment vector δ(X) can be recovered from
the internal angles of the marked roots on the boundary of the Siegel disk, as seen
from its center.
These general remarks are illustrated in greater detail in two low-degree families
of polynomialmaps. According to Douady and Hubbard, the combinatorial structure
of the Mandelbrot set (specifically, the boundary of the main cardioid and the limbs
growing from it) catalogs all rotation sets under the doubling map m
2
(see [9]
and [20]). We give a brief account of this in a section on the quadratic family,
setting the stage for the simplest higher degree example, namely, the family of
cubic polynomials with an indifferent fixed point of a given rotation number. This
one-dimensional slice was studied in [30] in the irrational case and has been the
subject of investigations by others (see for example [6]). There are indeed intriguing
connections between rotation sets under the tripling map m
3
and this cubic family.
Fix 0 <θ <1 and consider the space of monic cubic polynomials with a fixed
point of multiplier e
2πiθ
at the origin. Each such cubic has the form f
a
: z →
e
2πiθ
z + az
2
+ z
3
for some a ∈ C,wheref
a
and f
−a
are affinely conjugate under
the involution z →−z.Theconnectedness locus
M
3
(θ) ={a ∈ C : The Julia set J(f
a
) is connected}
is compact, connected, and full (compare Figs. 5.8 and 5.10). Outside M
3
(θ) exactly
one critical point of f
a
escapes to ∞ and the Böttcher coordinate of the escaping
co-critical point gives a conformal isomorphism CM
3
(θ) → CD which can
be used to define the parameter rays of M
3
(θ).
When θ is rational of the form p/q in lowest terms, the set X
a
of angles of
dynamic rays that land at the parabolic point 0 is a rotation set under tripling
with ρ(X
a
) = p/q.Thereare2q + 1 possibilities for X
a
parametrized by their
