
Chapter 11
Space Module On-Board Stowage
Optimization by Exploiting Empty
Container Volumes
Giorgio Fasano and Maria Chiara Vola
Abstract This chapter discusses a research activity recently carried out by Thales
Alenia Space, to support International Space Station (ISS) logistics. We investigate
the issue of adding a number of virtual items (i.e. items not given a priori) inside
partially loaded containers, in order to exploit the volume still available on board as
much as possible. Items already accommodated are supposed to be tetris-like,
while the additional virtual items are assumed to be parallelepipeds. A mixed-
integer non-linear programming (MINLP) model is introduced first, then possible
linear (MILP) approximations are discussed, and a corresponding heuristic solution
approach is proposed. Guidelines for future research are highlighted, and experi-
mental insights are provided to show the efficiency of the proposed approach.
Keywords Space cargo accommodation • Container loading problem • Non-standard
three-dimensional packing • Virtual items • Tetris-like items • MINLP models
• MILP approximations • Heuristics
11.1 Introduction
This study has been motivated by the challenging issue of cargo accommodation in
space vehicles and modules. Specifically, we focus on the on-board stowage
problem of the International Space Station (ISS, http://www.nasa.gov) with partic-
ular reference to the European Columbus Laboratory (http://www.esa.int). The
laboratory also provides logistic support for the ISS (consult [6]).
G. Fasano (*)
Thales Alenia Space Italia S.p.A., Str. Antica di Collegno 253, 10146 Turin, Italy
e-mail: [email protected]
M.C. Vola
Altran Italia S.p.A., Turin, Italy
e-mail: [email protected]
G. Fasano and J.D. Pinte
´
r (eds.), Modeling and Optimization in Space Engineering,
Springer Optimization and Its Applications 73, DOI 10.1007/978-1-4614-4469-5_11,
#
Springer Science+Business Media New York 2013
249
A fleet of vehicles is used for transportation, on the basis of the cargo plan
provided by NASA, to control the upload/download flow logist ic to/from the ISS.
The cargo plan is supposed to be repeatedly updated over time, as the whole logistic
process continues. If not all planned upload cargo can be accommodated at a given
time, then part of it can be temporary crossed off the list and taken into account in
further launches.
To meet (at least approximately) a given cargo plan, a number of non-trivial
three-dimensional packing problems arise. Once the optimal packing solution
(that offers the best loading of the listed items) at the current step is obtained, the
cargo engineer is still asked to execute a further demanding job. How could the
residual space (volume) be suitably exploited? More precisely, we assume that it is
allowed, for each container not yet fully loaded, to add a certain number of virtual
items (that are not known a priori), by reallocating the ones already accommodated,
if necessary. What sort of virtual items could be properly added, in order to
maximize the loaded volume of each container? A further optimization process is
then performed, and possible “hole-filling” (virtual) items are suggested, thereby
making the achievement of further cargo planning objectives significantly easier.
In this chapter we discuss the issue of optimizing the volume exploitation of a
partially loaded single container by adding up to a maximum number of virtual
items, repositioning, if necessary the objects already loaded. From the analytical
point of view, this problem is quite similar to the one consisting of creating internal
separation elements of filling material (such as foam), to protect the items
loaded inside the containers and to prevent their collision especially during the
launch phase.
Although our s tudy has originated in order to tackle the on-board stowage of
space modules, it can be applied also in many other contexts. Examples include
the use of autonomous robots in future space exploration ( e.g. to identify accessi-
bility zones and to support loading and assembling activities); another area—not
in the space engineering context—is that of the very large system integration
(VLSI).
The literature related to packing issues is extensive (consult, e.g. [3]). A major
subject area within this broad context is the orthogonal packing of two- and three-
dimensional objects inside convex domains (cf., e.g. [1, 7, 12, 13, 15]). A number of
mixed-integer (linear) programming (MILP) formulations of two- and three-
dimensional orthogonal packing problems are available (see, e.g. [2, 14 , 16]). The
topic discussed here extends a previous MIP-based approach (see [4]) devoted to
the three-dimensional packing of tetris-like items within a convex domain, in
presence of additional conditions. The term tetris-like refers either to
parallelepipeds or, more generally, to properly connected clusters of mutually
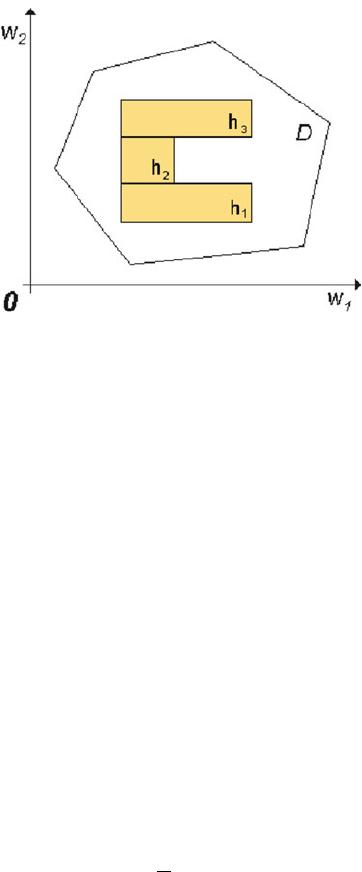
orthogonal parallelepipeds as illustrated by Fig. 11.1.
In the following discussion, we assume that the container is a convex domain.
Alreadyloadeditemsareassumedtobetetris-like, while the additional virtual
items are parallelepipeds of various sizes. Our objective is to create a number o f
virtual items (without exceeding a given bound) a nd to determine their sizes
so that the total loaded volume inside the c ontainer is maximized.
250 G. Fasano and M.C. Vola
The problem is stated in Sect. 11.2 . Section 11.3 formulates it in terms of mixed-
integer non-linear programming (MINLP) (consult, e.g. [8–11, 17, 18, 22]).
A simplified approach, based on MILP approximations, is discussed in Sect. 11.4.
A review of some real-world applications is given in Sect. 11.5, including the
discussion of a heuristic approach that has been quite efficient in practice.
11.2 Problem Statement
To formulate the problem studied, we shall consider a convex domain D which is a
polyhedron (or it can be approximated by a polyhedron). Inside D, we have a set of
n tetris-like items (TLI), each one consisting of a cluster of mutually orthogonal
parallelepipeds, called components, see Fig. 11.1.
We shall also suppose that the TLIs have been positioned within D, in compli-
ance with the following packing rules:
• each TLI has to be positioned parallel to an axis of a pre-fixed orthonormal
domain reference frame (orthogonality conditions);
• each TLI has to be contained within D (domain conditions);
• components of different TLIs cannot overlap (non-intersection conditions).
In particular, this means that at least a feasible solution to the orthogonal packing of
the given set of TLIs exists. We are then asked to add up to
N virtual items, consisting
of parallelepipeds with sides of variable length (but not less than a given minimal
threshold), so that the total volume occupied by the TLIs plus the virtual items
is maximized. We are not requested to keep the initial feasible solution for the TLIs,
i.e. we are allowed to move them by arbitrary feasible rotations and translations.
However, we must take into account the following rules for each virtual item (VI):
• each VI side has to be parallel to an axis of the pre-fixed orthonormal domain
reference frame (orthogonality conditions);
Fig. 11.1 Tetris-like item
(two-dimensional
representation)
11 Space Module On‐Board Stowage Optimization by Exploiting Empty... 251
• each VI has to be contained within D (domain conditions);
• VIs cannot overlap with the packed TLIs or with other VIs (non-intersection
conditions).
11.3 An MINLP Model Formulation
A MINLP formulation of the outlined optimization problem is described next.
First of all, let us point out that the packing rules expressed in Sect. 11.2 can be
grouped as follows:
• orthogonality, domain and non-intersection conditions for TLIs only;
• orthogonality, domain and non-intersection conditions for VIs only;
• non-intersection conditions between TLIs and VIs.
The orthogonality, domain and non-intersection conditions for TLIs have been
discussed in detail in [4]. For the sake of completeness, we will briefly discuss these
conditions here. An orthogonal main reference frame with origin O and axes w
b
,
b ∈ {1,2,3} is defined, and a local reference frame is associated to each TLI. Each
local reference frame is chosen so that all TLI components lie within its first
(positive) octant. Its origin coordinates, with respect to the main reference frame
axes, are denoted by o
bi
. Next, we introduce the set O of all possible orthogonal
rotations, admissible for any TLI’s local reference frame, with respect to the main
one. Under the orthogonality assumptions there are 24 orthogonal rotations since
the TLIs are in general asymmetric objects.
For each TLI i, we introduce the set C
i
of its (parallelepiped) components. E
hi
indicates, for each component h of TLI i, the set of the eight vertices associated to it,
and an extension of this set is obtained by adding to E
hi
the geometrical centre of
component h. This extended set is denoted by E
hi
and its generic element by
; ¼ 0, in particular, represents the geometrical centre. For each TLI i and each
possible (orthogonal) orientation o ∈ O ¼ {1,...,24}, the binary variables W
oi
2 0; 1
fg
are defined, with the mea ning: W
oi
¼ 1 if TLI i has the orthogonal
orientation o ∈ O, and W
oi
¼ 0 otherwis e.
The orthogonality conditions for TLIs (only) are expresse d as follows:
8i
X
o
W
oi
¼ 1; (11.1)
8b; 8i; 8h 2 C
i
; 8 2 E
hi
; w
bhi
¼ o
bi
þ
X
o
W
obhi
W
oi
; (11.2)
where w
bhi
are the vertex coordinates of component h or its geometrical centre,
relative to TLI i, with respect to the reference frame axes w
b
; W
obhi
are the
coordinate differences between points 2 E
hi
and the origin of the local reference
252 G. Fasano and M.C. Vola
frame, with o
bi
coordinates, projected alon g the w
b
axis of the main reference frame,
corresponding to the TLI i orientation o.
Next, the domain conditions for TLIs (only) are expressed as follows:
8b; 8i; 8h 2 C
i
; 8 2 E
hi
w
bhi
¼
X
g
V
bg
l
ghi
; (11.3)
8i; 8h 2 C
i
; 8 2 E
hi
X
g
l
ghi
¼ 1; (11.4)
where l
ghi
are non-negative variables; (V
11
,V
21
,V
31
),...,(V
1u
,V
2u
,V
3u
) are the
vertices of D (whose coordinates, in the main reference frame, are assumed as
non-negative, without loss of generality).
The non-intersection conditions (again, for TLIs only) are represented by the
constraints below:
8b; 8i; 8j; i < j; 8h 2 C
i
; 8k 2 C
j
w
b0hi
w
b0kj
1
2
X
o
L
obhi
W
oi
þ L
obkj
W
oj
D
b
1 s
þ
bhkij
;
(11.5.1)
8b; 8i; 8j; i < j; 8h 2 C
i
; 8k 2 C
j
w
b0kj
w
b0hi
1
2
X
o
L
obhi
W
oi
þ L
obkj
W
oj
D
b
1 s
bhkij
;
(11.5.2)
8i; 8j; i < j; 8h 2 C
i
; 8k 2 C
j
X
b
s
þ
bhkij
þ s
bhkij
1; (11.6)
where D
b
are the sides (parallel to the main reference frame axes) of the parallele-
piped of minimum volume that encloses D; w
b0hi
and w
b0hj
are the centre coordinates
of components h and k; L
obhi
and L
obkj
are their sides, parallel to the w
b
axis,
corresponding to the orientation o and s
þ
bhkij
and s
bhkij
2f0; 1g. If either in (11.5.1)
or (11.5.2) a variable s is set to one, then the corresponding constraint is called a
relative position constraint.
Constraints (11.1)–(11.6) represent the necessary and sufficient conditions for
placing the given n TLIs in compliance with the packing rules stated above and hold
when only TLIs are involved (constraints 11-6 can be expressed in terms of
equations, in order to make the model formulation tighter). The orthogonality,
domain and non-intersection conditions for VIs only, as well as the non-intersection
ones involving both TLIs and VIs, are formulated next.
As the number of VIs actually used may be smaller than the maximum allowable
N, the binary variable w
j
∈ {0,1}, j ∈ {1,...,N}, is introduced: w
j
¼1ifVIj is used,
and w
j
¼ 0 otherwise.
11 Space Module On‐Board Stowage Optimization by Exploiting Empty... 253

The orthogonality conditions for VIs are then implicitly stated by the following
domain conditions and hold for each vertex of VI j:
8b; 8j; 8 2 E
j
w
bj
¼
X
g
V
bg
l
gj
; (11.7)
8j; 8 2 E
j
X
g
l
gj
¼ w
j
; (11.8)
where E
j
is the set of vertices associated to VI j and w
bj
are their coordinates; both
w
bj
and l
gj
are non-negative variables.
The following inequalities represent the non-intersection conditions between the
generic TLI i and VI j:
8b; 8i; 8j; 8h 2 C
i
w
b0hi
w
b0j
1
2
X
o
L
obhi
W
oi
þ
1
2
l
bj
D
b
1 s
þ
bhij
;
(11.9.1)
8b; 8i; 8j; 8h 2 C
i
w
b0j
w
b0hi
1
2
X
o
L
obhi
W
oi
þ
1
2
l
bj
D
b
1 s
bhij
;
(11.9.2)
8i; 8j; 8h 2 C
i
X
b
s
þ
bhij
þ s
bhij
¼ w
j
; (11.10)
where w
b0j
are the centre coordinates of VI j, l
bj
the side parallel to the w
b
axis,
s
þ
bhij
2f0; 1g and s
bhij
2f0; 1g are binary variables.
The condition s
þ
bhij
¼ 1 implies that the side projection of h and j respectively do
not overlap along the w
b
axis and h precedes j, while s
þ
bhij
¼ 0 makes the
corresponding non-i ntersection constraint redundant. An essentially identical con-
sideration holds for s
bhij
Analogous constraints are stated when dealing with the non-intersection
conditions relative to each pair of VIs:
8b; 8j; 8j
0
; j<j
0
w
b0j
w
b0j
0
1
2
l
bj
þ l
bj
0
D
b
1 s
þ
bjj
0
; (11.11.1)
8b; 8j; 8j
0
; j<j
0
w
b0j
0
w
b0j
1
2
l
bj
þ l
bj
0
D
b
1 s
bjj
0
; (11.11.2)
8j; 8j
0
; j<j
0
X
b
s
þ
bjj
0
þ s
bjj
0
w
j
þ w
j
0
1:
(11.12)
254 G. Fasano and M.C. Vola

The lower bound L is further introduced for all VI sides, in order to obtain valid
solutions from a practical point of view (since too small VIs would be useless),
together with additional upper bounds:
8j
Lw
j
l
bj
D
b
w
j
: (11.13)
The objective function to maximize is simply defined by the total volume of the
VIs added:
max
X
j
Y
b
l
bj
()
: (11.14)
Remark 1 In [4], a number of additional conditions such as a given minimum gap
between items, the pre-fixed position or orientation of some of them, the presence
of structural elements, forbidden zones (holes) inside the domain and separation
planes (movable within given ranges) have been taken into account. Such
conditions can be easily added to the model under consideration here; in fact,
such conditions are taken into account in some of the tests reported in Sect. 11.5).
Remark 2 As far as the balancing conditions are concerned , the concept expressed
in the previous work [4] could also be easily added to the present MINLP model by
associating to each (added) VI a constant (average) density r . The previous
balancing expressions are rewritten:
8g; c
g
0;
X
r
g¼1
c
g
¼m
8b
X
n
i¼1
M
i
w
bi
þ
X
N
j¼1
rw
bj
Y
b
l
bj
!
¼
X
r
g¼1
V
bg
c
g
where
m ¼
X
n
i¼1
M
i
þ
X
N
j¼1
r
Y
b
l
bj
!
:
Differently from the case discussed in [4], the above conditions are not linear.
Remark 3 The presence of the binary variable w
j
in the expressions (11.13)
guarantees that if a certain virtual item is not added, its contribution to the total
volume computation is zero.
11 Space Module On‐Board Stowage Optimization by Exploiting Empty... 255

11.4 MILP Model Approximations
The MINLP model formulated in Sect. 11.3 is (most likely) hard to solve to
optimality. A first simple linear approximation is generated easily by adopting the
surrogate objective function below:
max
X
b;j
l
bj
()
: (11.15)
An alternative approach consists of substituting the original objective function
(11.14) by a separable one. This can be easily achi eved by adopting the (equivalent)
objective function:
max
X
j;b
ln l
bj
()
: (11.16)
A linear piece-wise approximation of each single-variable term then reduces the
original MINLP model to a much simpler (approximate) MILP (cf., e.g. [ 20 ]). A
straightforward formulation to obtain this can be achieved as follows (consult [21]).
For each b, we introduce an arbitrary partition A
b0
; ...; A
ba
; ...
of [ L; D
b
] and
then state the conditions
8b; 8jl
bj
¼
X
a
l
baj
A
ba
; (11.17)
8b; 8j ln l
bj
X
a
l
baj
ln A
ba
; (11.18)
8b; 8j
X
a
l
baj
¼ w
j
; (11.19)
where, for each b and j, the l
aj
variables are subject to the further SOS2 (special
ordered set of type 2, [21]) restriction: at most two consecutive l
baj
can be non-zero.
The objective function then becomes
max
X
a;b;j
l
baj
ln A
ba
()
: (11.20)
Remark 4 The SOS2 restriction shown above can be tackled either algorithmically
or by introducing additional binary variables and proper constraints in the model
[19, 21]. If could also be seen that such restriction in our specific case could be
dropped tout court, but this is beyond the scope of the chapter.
256 G. Fasano and M.C. Vola

Remark 5 A further possibility of converting a sum of products into a separable
function could be considered [21]. In the case of the product of two variables q
1
q
2
it
is sufficient to introdu ce new variables s
1
,s
2
, by performing the transformation
s
1
¼
1
2
ðq
1
þ q
2
Þ; s
2
¼
1
2
ðq
1
q
2
Þ;
and substituting q
1
q
2
with s
1
2
s
2
2
. The method can be easily extended when the
products involve more than two variables and a linear piece-wise approximation of
the quadratic terms obtained can be achieved, as in the case of the logarithmic
functions discussed above.
Remark 6 The MILP approximations described in this section could well be
considered to provide a good starting solution to an MINLP solution process.
11.5 Practical Applications
On the basis of the MILP approximation relative to the surrogate objective function
11.15 mentioned in Sect. 11.4, a heuristic approach has been investigated to obtain
quick (satisfactory, but typically suboptimal) solutions to the original problem : this
approach will be reviewed next.
An appropriate lower bound, as stated by conditions (11 .13), is generated each
time, depending on the specific model instance analysed. In addition to this point, it
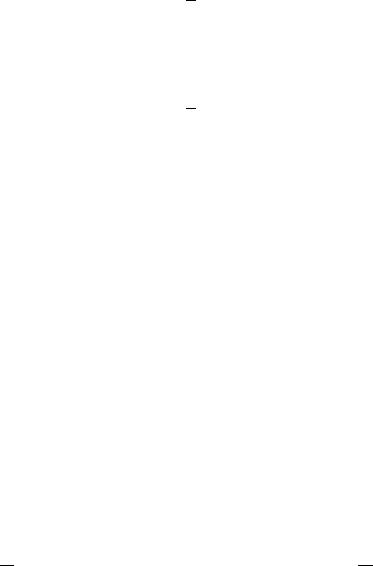
is recommended to get rid of solutions with strongly asymmetric, “non-cube-
shaped” VIs. (The surrogate objective function tends to give rise to such VIs, as
matter of fact.) Figure 11.2 illustrates an example with just three VIs. In the image
on the left no additional limitation was posed, unlike in the case shown on the right.
The heuristic approach proposed here poses further conditions on the possibility
of reallocating the already loaded TLIs. Whi le o rthogonal rotations of the TLIs are
allowed (except for the pre-oriented ones, if any), their translations are partially
restricted on the basis of the relative positions they already have (refer to constraints
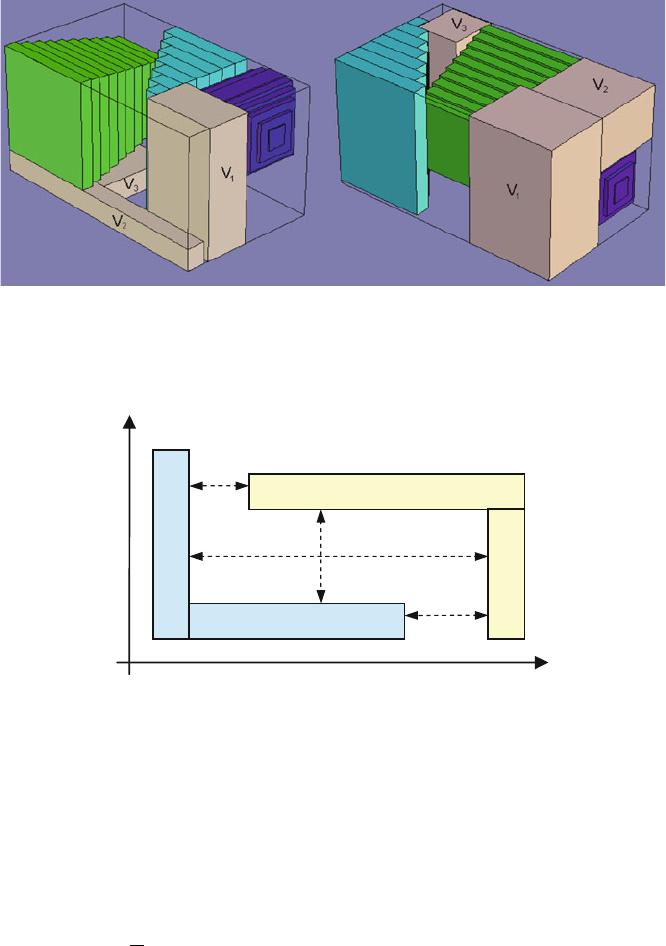
(11.5.1) and (11.5.2)). This restriction is linked to the concept of abstract configu-
ration [4, 5]: given a number of couples of components (belonging to different
TLIs) an abstract configur ation consists of a set of variables s set to one (one and
only one for each couple), so that, in any unbounded domain, the subspace
delimited by the corresponding non-intersection constraints is a feasible region
(see Fig. 11.3).
In the heuristic approach proposed here, as a first step, an abstract configuration
compliant with the solution of the already loaded TLIs is selected. This can be done
as suggested in [5]. The abstract configuration is then imposed to the MILP model,
so that only the relative non-intersection constraints are considered, while all the
remaining ones are neglected. This gives rise to a reduced MILP model that
dramatically decreases the computational effort of the solution process.
11 Space Module On‐Board Stowage Optimization by Exploiting Empty... 257
Since the addition of several VIs all together would represent a significant
computational job, the heuristic procedure proceeds, step by step, adding one VI
after the other, until a satisfactory solution is obtained or their maximum number is
reached. The heuristic proposed is based on the algorithm outlined here below.
Algorithm. Incremental introduction of virtual items
Input n tetris-like items, convex domain
Output tetris-like items repositioning, positions and dimensions of the added
virtual items (<
N)
Begin
Generate an abstract configuration corresponding to the given tetris-like item
accommodation;
j 0; //numer of virtual items
Fig. 11.2 Example of solutions without/with extra limitations: compare the left/right side
solutions shown
Fig. 11.3 Example of an abstract configuration: two-dimensional representation
258 G. Fasano and M.C. Vola
