Cybernetics and Systems Analysis, Vol. 52,
No.
3, May, 2016
A NUMERICAL METHOD FOR SOLVING
A SYSTEM OF HYPERSINGULAR INTEGRAL
EQUATIONS OF THE SECOND KIND
O. V. Kostenko UDC 517.698.519.6
Abstract. A numerical method for solving a system of hypersingular integral equations of the
second kind is presented. The theorem on the existence and uniqueness of a solution to such a system
is proved. The rate of convergence of an approximate solution to the exact solution is estimated.
Keywords: system of integral equations, numerical method, integral in the sense of the Hadamard
finite part, existence and uniqueness of solutions, convergence rate.
PROBLEM STATEMENT
In solving applied problems of mathematics and also in mathematical modeling of physical processes, systems of
integral equations occur that are of the following form:
hu y y
ut
ty
tdt
a
tyut
i
i
i
()
()
()
ln | | ( )1
1
11
2
2
2
1
1
--
-
-+ -
-
ò
pp
-
-
ò
tdt
2
1
1
+-=
-
=
¹
ò
å
1
1
2
1
1
1
p
Ktyut tdtfy
ik i
k
ki
m
i
(, ) () ( )
,
im=1,
, (1)
where
h
and
a
are given complex and real constants, respectively. We denote by
C
r
[,]
,
-11
a
the set of functions that are
continuously
r
-times differentiable on the interval
[,]-11
and are such that the
r
th derivative on the interval
[,]-11
satisfies the H
&&
o
lder condition with the index
a
,
01<£a
. Suppose that, in the system of integral equations (1),
functions
fy
i
()
,
im=1,
, belong to the set
C
[,]
,
-11
0 a
, functions
Kty
ik
(, )
,
im=1,
,
km=1,
, belong to the set
C
[,]
,
-11
1 a
with respect to each variable uniformly relative to the other variable, and the sought-for functions
ut
i
()
,
im=1,
,
belong to the set
C
[,]
,
-11
1 a
. The second addend in the left side of the
i
th (
im=1,
) equation of system (1) is understood
in the sense of the finite Hadamard part, and the third addend is an improper integral.
This system of equations is obtained by the author of this article in constructing a mathematical model of
diffraction scattering of waves by a lattice consisting of a finite number of imperfectly conductive tapes [1], which
confirms its urgency.
The objective of this article is the presentation of a numerical method for solving the system of integral
equations (1) and its substantiation, namely, the proof of a criterion for the existence and uniqueness of a solution,
estimation of the norm of the difference between approximate and exact solutions that allows one to characterize the
394
1060-0396/16/5203-0394
©
2016 Springer Science+Business Media New York
B. Verkin Institute for Low Temperature Physics and Engineering, National Academy of Sciences of Ukraine,
Kharkiv, Ukraine, alexvladkost@gmail.com and kostenko@ilt.kharkov.ua. Translated from Kibernetika i Sistemnyi
Analiz, No. 3, May–June, 2016, pp. 67–82. Original article submitted April 6, 2015.
DOI 10.1007/s10559-016-9840-3
convergence rate of the proposed method, demonstration and analysis of the results of its application to the solution of
model problems, and also estimation of its numerical convergence.
Note that, at the present time, qualitative properties of exact and approximate solutions of hypersingular integral
equations are studied and new methods for solving them [2–4] are constructed.
FUNCTION SPACES, OPERATORS, AND THEIR PROPERTIES
Let
P
I
and
P
II
be two instances the Hilbert space of polynomials with the following scalar products, respectively:
( (), ()) () () ( () )( ()ut t ut t t dt ut t tuu u
P
I
º-+-
-
ò
111
2
1
1
2
'
--
-
ò
ttdt
22
1
1
1)
'
,
((), ()) ()()ut t ut t t dtuu
P
II
º-
-
ò
1
2
1
1
.
We now introduce the following linear operators:
( )() ()Ru y hu y yº-1
2
,
()()
()
()
Au y
ut
ty
tdtº
-
-
-
ò
1
1
2
2
1
1
p
,
()() ln| |()Bu y t y u t t dtº--
-
ò
1
1
2
1
1
p
,
()() (,)()Kuy K tyut tdt
ik ik
º-
-
ò
1
1
2
1
1
p
,
imk m==11,, ,
.
The operator
A
transforms a polynomial into a polynomial and preserves its degree, and the operator
B
also
transforms a polynomial into a polynomial but increases its degree by two [5]. In particular, the operators
A
and
B
are
defined on the space
P
I
and transform it into the space
P
II
. The operators
R
and
K
transform polynomials from the
space
P
I
into functions in general form.
Let
Ï
I
and
Ï
II
be the Hilbert spaces of the vector functions whose components belong to the spaces
P
I
and
P
II
,
respectively. Elements of these spaces are of the form
u () ( ())tut
i
i
m
=
=1
, where
ut
i
()
,
im=1,
, is a polynomial belonging
to the space
P
I
or
P
II
. We define the scalar products in the spaces
Ï
I
and
Ï
II
, respectively, as follows:
( (), ()) ( (), ())u tt ut t
kk
k
m
u
Ï
II
º
=
å
u
P
1
,
( (), ()) ( (), ())u tt ut t
kk
k
m
u
Ï
II II
º
=
å
u
P
1
.
Let us consider the linear operators
( )( ) (( )( ))Ru yRuy
i
i
m
º
=1
,
(2)
395

( )( ) (( )( ))Au yAuy
i
i
m
º
=1
, (3)
( )( ) (( )( ))Bu yBuy
i
i
m
º
=1
, (4)
( )() ( )()Ku yKuy
ik i
k
ki
m
i
m
º
æ
è
ç
ç
ç
ö
ø
÷
÷
÷
=
¹
=
å
1
1
. (5)
Since the operator
A
transforms a polynomial into a polynomial and preserves its degree, the operator
A
defined
by rule (3) transforms a vector function consisting of polynomials into a similar vector function and preserves the degree
of each component. Since the operator
B
transforms a polynomial to a polynomial and increases its degree by two, the
operator
B
defined by rule (4) transforms a vector function consisting of polynomials into a similar vector function but
increases the degree of each component by two. Thus, the operators
A
and
B
are defined on the space
Ï
I
and transform it
into the space
Ï
II
. Since the operators
R
and
K
ik
(,, ,)imk m==11
transform a polynomial into a function in general
form, the operators
R
and
K
defined by rules (2) and (5), respectively, transform vector functions consisting of
polynomials into vector functions consisting of functions in general form.
In operator representation, the system of hypersingular integral equations of the second kind (1) assumes the
following form:
( )() ( )() ( )() ( )() ()Ru Au Bu Ku fyyayyy-+ +=
, (6)
where
f () ( ())yfy
i
i
m
=
=1
. A solution to the system of equations (6) is called exact and the system itself is called
a system with respect to the exact solution.
Denote by
L
I
and
L
II
supplements of the Hilbert spaces
P
I
and
P
II
and by
L
I
and
L
II
supplements of the Hilbert
spaces
Ï
I
and
Ï
II
with respect to the corresponding norms. We will denote the extensions of the operators to the
introduced spaces by the same symbols.
REGULARIZATION OF OPERATORS, INTERPOLATION POLYNOMIALS,
AND QUADRATURE FORMULAS
As has been noted earlier, the operators
R
,
A
,
B
,and
K
defined by rules (2)–(5), respectively, acts differently
on elements of the space
Ï
I
, which complicates the discretization of a system of hypersingular integral equations of the
second kind. To avoid these difficulties, the operators
R
,
B
,and
K
are regularized. In this case, by regularization we
understand the construction of an operator that preserves the degree of a polynomial and whose norm is close to that of the
polynomial being regularized. The term regularization of an operator was first used in this sense in the theory of integral
equations in [6] (note that this work was presented by A. N. Tikhonov). This term also occurs in the key works [7–10].
Thus, as a result of regularization, the operators are defined that act from the space
L
I
into the space
L
II
and are
close in terms of norm to the operators
R
,
B
, and
K
that transform a vector function consisting of polynomials into
a similar vector function with preserving degrees of polynomials. Note also that a result of regularization is the
construction of a system of integral equations whose solution is close to the solution of system (6) in terms of norm, i.e.,
to the exact solution. The solution of a regularized system of integral equations is called approximate.
Let
Tt
n
()
be a first-kind Chebyshev polynomial of degree
n
, let
Ut
n-1
()
be a second-kind Chebyshev polynomial
of degree
()n -1
, let
{}t
j
n
j
n
01
1
=
-
be roots of a polynomial
Ut
n-1
()
,
t
j
n
j
n
0
= cos p
,
jn=-11,
, and let
ut
n-2
()
be a
polynomial of degree
()n -2
. Then
ut
n-
=
2
() utl t
n
j
n
nj
j
n
--
=
-
å
2
0
2
1
1
() ()
,
is the interpolation polynomial of the function
ut
n-2
()
of degree
()n -2
. Here,
lt
Ut
Uttt
nj
n
n
j
n
j
n
-
-
-
=
¢
-
2
1
1
00
,
()
()
()( )
,
jn=-11,
, are basic polynomials.
396
We denote
u
nin
i
m
tu t
i
--
=
=
22
1
() ( ())
,
, where
ut
in
i
,
()
-2
is a polynomial of degree
()n
i
-2
,
im=1,
.
The regularization of the operator
B
is the operator [11] denoted by
B
n-2
and acting from the space
P
I
into the
space
P
II
,
( )() ( )()Bu y Bu y
nn n-- -
º
22 2
+
-
+
æ
è
ç
ö
ø
÷
-
--
-
1
2
1
2
1
11
2
p
TyTt
n
TyTt
n
ut t
nn nn
n
() () () ()
()
2
1
1
dt
-
ò
. (7)
The following inequality holds:
|| ||
()
BB
c
nn
n
L
B
-
-£
-
2
1
II
, (8)
where
n ³ 2
and
c
B
is a constant independent of a number
n
.
As the regularization of the operator
B
, the operator
()()Bu
nn
y
--
=
22
(( )( ))
,
Bu y
nin
i
m
i
--
=
22
1
is chosen that acts
from the space
L
I
into the space
L
II
. By construction, it transforms a vector function consisting of polynomials of degree
()n
i
-2
into a similar vector function. By virtue of estimate (8), the operator
B
n-2
is close in terms of the norm of
L
II
to
the operator
B
. As is easily seen, the following inequality holds:
|| ||
()
BB
L
n
B
mc
NN
-
-£
-
2
1
II
, (9)
where
N
is the smallest number among
n
i
,
im=1,
, and
c
B
is a constant that enters in estimate (8) and is
independent of numbers
n
i
,
im=1,
.
As the regularization of the operator
R
, the following operator is proposed that acts from the space
P
I
into the
space
P
II
and is denoted by
R
n-2
:
( )() () () ()
,
Ru yh t u tl y
nn
k
n
n
k
n
nk
k
n
-- - -
=
-
º-
å
22
0
2
2
0
2
1
1
1
. (10)
By construction, the operator
R
n-2
preserves the degree of a polynomial and, in terms of the norm of
L
II
, is close
to the operator
R
[12]. The following inequality holds:
|| ||RR
c
n
n
L
R
-
-£
2
II
, (11)
where
n ³ 2
and
c
R
is a constant independent of
n
.
As the regularization of the operator
R
, we choose the operator
()()Ru
n
n
y
-
-
=
2
2
(( )( ))
,
Ru y
nin
i
m
i
--
=
22
1
acting
from the space
L
I
into the space
L
II
. By construction, it transforms a vector function consisting of polynomials of degree
()n
i
-2
into a similar vector function. By virtue of estimate (11), it is close in terms the norm of
L
II
to the operator
R
.As
is easily seen, the following inequality holds:
|| ||RR
L
n
R
mc
N
-
-£
2
II
, (12)
where
N
is the smallest among numbers
n
i
,
im=1,
, and
c
R
is a constant that enters in estimate (11) and is
independent of numbers
n
i
,
im=1,
.
397
Denote by
Kty
ik n
i
,
(, )
-2
an interpolation polynomial
Kty
ik
(, )
with nodes
{}t
j
n
j
n
ii
01
1
=
-
with respect to each variable,
KttKtt
ik n
j
n
k
n
ik
j
n
k
n
i
ii ii
,
(, ) (, )
-
º
2
00 00
,
jn
i
=-11,
,
kn
i
=-11,
,
im=1,
. In [11], the following solution to the problem of
regularization of the operator
K
ik
(we denote it by
K
ik n
i
, -2
) is proposed:
()() (,)()
,,
Kuy K tyuttdt
ik n n ik n n
ii i i
-- - -
-
º-
22 2 2
2
1
1
1
p
1
ò
, (13)
where
ut
n
i
-2
()
is a polynomial of degree
()n
i
-2
. The operator
K
ik n
i
, -2
defined by rule (13) acts from the space
P
I
into the space
P
II
, preserves the degree of a polynomial, and is close in terms of norm to the operator
K
ik
,
|| ||
,
KK
c
n
ik n ik
L
K
i
i
-
+
-£
2
1
II
a
, (14)
where
n
i
³ 2
and
c
K
is a constant independent of
n
i
.
As the regularization of the operator
K
, we choose the operator defined by
()()Ku
nn
y
--22
=
--
=
(( )( ))
,
Kuy
ik n n
i
m
ii
22
1
and acting from the space
L
I
into the space
L
II
. By construction, it transforms a vector function consisting polynomials
of degree
()n
i
-2
into a similar vector function. By virtue of estimate (14), this operator is close in terms of the norm of
L
II
to the operator
K
. It is easy to see that the following inequality holds:
|| ||KK
L
n
K
mc
N
-
+
-£
2
1
II
a
, (15)
where
N
is the smallest among numbers
n
i
,
im=1,
, and
c
K
is a constant that enters in estimate (14) and is
independent of numbers
n
i
,
im=1,
.
We denote by
fy
in
i
,
()
-2
the interpolation polynomial of degree
()n
i
-2
of a function
fy
i
()
with nodes
{}t
j
n
j
n
ii
01
1
=
-
,
ftft
in
j
n
i
j
n
i
ii
,
() ()
-
º
2
00
,
jn
i
=-11,
. The following inequality holds:
|| ||
,
ff
c
n
in i
L
f
i
i
-
+
-£
2
1
II
a
, (16)
where
n
i
³ 2
and
c
f
is a constant independent of
n
i
.
Denote
f
nin
i
m
yf y
i
--
=
=
22
1
() ( ())
,
. By virtue of estimate (16), the following inequality holds:
|| ||ff
L
n
f
mc
N
-
+
-£
2
1
II
a
, (17)
where
N
is the smallest among numbers
n
i
,
im=1,
, and
c
f
is a constant that enters in estimate (16) and is
independent of numbers
n
i
,
im=1,
.
Thus, the operators
R
n-2
,
B
n-2
, and
K
n-2
determine a regularized system of hypersingular second-kind integral
equations that is of the following form in operator representation:
( )() ( )() ( )() ( )Ru u Bu K u
nn n nn nn
yA ya y
-- - -- --
-+ +
22 2 22 22
() ()yy
n
=
-
f
2
. (18)
Note that a solution to system (18) is called approximate.
The left and right sides of the system of equations (18) are vectors consisting of polynomials whose corresponding
components have equal degrees. The coincidences of components of these vectors at
()n
i
i
m
-
=
å
2
1
different points
{}t
j
n
j
n
ii
01
1
=
-
,
im=1,
, is the necessary and sufficient condition for their identical equality. Successively putting
yt
j
n
i
=
0
,
jn
i
=-11,
,
im=1,
, and applying quadrature formulas of interpolation type [5], we obtain the following system of linear
algebraic equations with respect to
(( ( )) )
,
ut
in
j
n
j
n
i
m
i
ii
-
=
-
=
2
01
1
1
:
398
au ta
qj n n i n
j
n
j
n
i
m
qp
ip i
i
i
,,
()
-
=
-
=
åå
=
2
0
1
1
1
,
qn
p
=-11,
,
pm=1,
, (19)
where
aaaaa
qj n n
qj n n qj n n qj n n qj n
ip
ip ip ip
,
,
()
,
()
,
()
,
=-++
123
ip
n
()4
,
ahtlt
qj n n
j
n
nj
q
n
ip
i
i
p
,
()
,
() ()
1
0
2
2
0
1=-
-
,
a
t
nt t
qj n n
j
n
jq
q
n
j
n
ip
i
p
i
,
()
( ( ) )(( ) )
(
2
0
21
00
111
=
--+
-
++
)
2
when
jq¹
and
a
n
qj n n
i
ip
,
()2
2
=-
when
jq=
,
aa
t
n
Tt Tt
m
qj n n
j
n
i
m
q
n
m
j
n
m
ip
i
p
i
,
()
()
ln
()()
3
0
2
00
1
22=
-
+
=
-
+
å
æ
è
ç
ç
ç
-
-
-
1
1
00
2
1
1
n
qj
q
n
j
n
i
i
p
i
tt
n
() )
-
-
ö
ø
÷
÷
+
()1
qj
i
n
,
a
t
n
Ktt
qj n n
j
n
i
ij n
q
n
j
n
ip
i
i
p
i
,
()
,
()
(,)
4
0
2
2
00
1
=
-
-
,
aft
qp p
q
n
p
= ()
0
.
When the system of linear algebraic equations (19) is solved and components
(( ( )) )
,
ut
in
j
n
j
n
i
m
i
ii
-
=
-
=
2
01
1
1
are found,
the solution of system (18) is constructed as follows:
u
nin
j
n
in j
j
n
tutlt
i
i
i
i
---
=
-
=
æ
è
ç
ç
ö
ø
÷
÷
å
22
0
2
1
1
() ( ) ()
,,,
i
m
=1
.
REGULARIZED DISCRETE MATHEMATICAL MODEL
As has been noted earlier, in operator representation, system (1) of hypersingular integral equations of the second
kind is of the form (6) and its solution is called exact. The regularized system of integral equations is of the form (18) and
its solution is called approximate.
Thus, to find an approximate solution to the system of integral equations, system (19) of linear algebraic equations
should be solved. Thus, the following theorem holds.
THEOREM 1. The interpolation polynomial constructed from the solution of the system of linear algebraic
equations (19) is an approximate solution to the system of hypersingular integral equations of the second kind.
THEOREM ON THE EXISTENCE AND UNIQUENESS
OF A SOLUTION TO A SYSTEM OF HYPERSINGULAR
INTEGRAL EQUATIONS OF THE SECOND KIND
To prove this statement, Theorems 2–6 given below are required.
THEOREM 2 [12]. The operator
()RA-
acting from the space
L
I
into the space
L
II
is bounded,
|| ( ) ||RA
L
-£
II
2
, and invertible, i.e., there is the operator
()RA-
-1
that acts from the space
L
II
into the space
L
I
and is
such that
|| ( ) ||RA
L
-£
-1
1
I
.
From Theorem 2, we obtain the following theorem.
THEOREM 3. The operator
()RA-
acting from the space
L
I
into the space
L
II
is bounded,
|| ( ) ||RA
L
-£
II
2m
,
and invertible, i.e., there is the operator
()RA-
-1
acting from the space
L
II
into the space
L
I
, and
|| ( ) ||RA
L
-£
-1
I
m
.
THEOREM 4 [11]. The operator
aB K+
acting from the space
L
I
into the space
L
II
is compact.
From Theorem 4, we obtain the following theorem.
THEOREM 5. The operator
aBK+
acting from the space
L
I
into the space
L
II
is compact.
THEOREM 6 [13]. Let
T
be a compact operator, and let
I
be a unit operator. Then the following statements are
equivalent:
—
()ITxb-=
is solvable with any right side;
—
()ITx-=0
has no nonzero solutions;
—
()ITxb-=
is solvable with any right side, and the solution is unique.
399
To prove the theorem on the existence and uniqueness of a solution to the system of hypersingular integral
equations of the second kind, the well-known statement on the compactness of a composition of compact and bounded
operators [13] will also be required.
We now formulate and prove the criterion of the existence and uniqueness of a solution to a system of
hypersingular integral equations of the second kind.
THEOREM 7. A solution to the system of hypersingular integral equations of the second kind (1) with any right
side belonging to the space
L
II
belongs to the space
L
I
, exists, and is unique if and only if the corresponding
homogeneous system of integral equations has no nonzero solutions.
Proof. Let the mentioned homogeneous system of hypersingular integral equations of the second kind have no
nonzero solutions. Let us prove that a solution to system (6) exists and is unique. We transform system (6) by applying
the operator
()RA-
-1
to both its sides; the operator acts from the space
L
II
into the space
L
I
and its existence is
provided by Theorem 3. We obtain
( )() ( ) (( ))() (( ) )()Iu R A B K u R A fyay y+- + = -
--11
.
By Theorem 5, the operator
aBK+
acting from the space
L
I
into the space
L
II
is compact. Then the operator
()( )RA BK-+
-1
a
acting from the space
L
II
into the space
L
I
is compact as the composition of compact and
bounded operators. Since, according to the assumption, the system of integral equations has no nonzero solutions,
by Theorem 6, it is uniquely solvable with any right side belonging to the space
L
II
.
If we assume that a solution to system (6) exists, then, by Theorem 6, the corresponding homogeneous system of
integral equations has no nonzero solutions.
The theorem is proved.
Note that the system of boundary hypersingular second-kind integral equations that arises in solving scattering
and diffraction problems [1] satisfies the presented criterion for the existence and uniqueness of its solution, namely,
the corresponding homogeneous system of integral equations has no nonzero solutions. It is connected with the fact that
this system of integral equations is derived by equivalent transformations from a paired integral equation based on the
Fourier transform.
In fact, suppose that there is a function that is not identically equal to zero and is a solution of a homogeneous
system of hypersingular integral equations of the second kind. As has been noted earlier, a paired integral equation
implies that the Fourier transform of the sought-for function equals to zero almost everywhere, which is possible only if
the sought-for function is equal to zero almost everywhere. But this contradicts the assumption. An expanded proof
of this statement is easily constructed based on the above reasoning and calculations presented in [1, 12].
In the case when the solution of the system of equations (6) is searched for in the space
L
II
, i.e., when the
operators generated by system (1) act from the space
L
II
into the space
L
II
, it is impossible to prove the proposed
criterion for the existence and uniqueness of a solution of the system of integral equations. The reason is that, in acting
from the space
L
II
into the space
L
II
, the operator
A
is not bounded [11]. However, then, as shown in [14], the operator
inverse to the operator
A
is of the form
( )() ln ()At
t
ty
ty t y
tdy
-
-
º
-
-
-- - -
ò
1
222
1
1
1
1111
u
p
u
and acts from the space
L
II
into the space
L
II
. The operator
A
-1
has a logarithmic singularity in its kernel and is
compact. It is easy to see that the operator
A
-1
defined as
()()A
-1
u t º
-
=
(( )( ))At
i
i
m1
1
u
and acting from the space
L
II
into the space
L
II
is also compact.
We now briefly substantiate the criterion for the existence and uniqueness of a solution to the system of integral
equations in the case when the solution belongs to the space
L
II
. Applying the operator
A
-1
to system (6), we transform
it to the form
( )() ( )() (( ( )))() ( )()Iu A Ru A B K u A fyyayy+++=
-- -11 1
.
400
The operator
ARA BK
--
++
11
()a
acting from the space
L
II
into the space
L
II
is compact as the sum of
compositions of a compact operator and bounded operators.
Thus, we have obtained the criterion for the existence and uniqueness of a solution to a system of hypersingular
integral equations of the second kind in the space
L
II
.
THEOREM 8. A solution to the system of hypersingular integral equations of the second kind (1) with any right
side belonging to the space
L
II
also belongs to the space
L
II
, exists, and is unique if and only if the corresponding
homogeneous system of integral equations has no nonzero solutions.
Let us prove the solvability of the system of linear algebraic equations (19). The statements of Theorems 7 and 8
are naturally extended to the regularized system of hypersingular integral equations of the second kind (18). Thus, the
criterion for the existence and uniqueness of a solution to system (18) in the corresponding spaces is obtained. In
particular, suppose that the solution of the system of hypersingular integral equations (1) exists and is unique. Then the
solution of the regularized system of integral equations (18) also exists and is unique. As has been noted earlier,
the interpolation polynomial constructed based on the solution of system (18) is its exact solution. If the system of linear
algebraic equations (19) is inconsistent or has a set of solutions, then we obtain the contradiction stemmed from the fact
that the solution to system (18), i.e., an interpolation polynomial, exists and is unique by virtue of the uniqueness of the
interpolation polynomial. Thus, if the solution of the system of integral equations (1) exists and is unique, then the
solution of the system of linear algebraic equations (19) also exists and is unique.
RATE OF CONVERGENCE OF AN APPROXIMATE SOLUTION
TO THE EXACT SOLUTION
An estimate for the norm of the difference between exact and approximate solutions of a system of hypersingular
integral equations of the second kind is obtained with the help of the following theorem.
THEOREM 9 [15]. Let
X
and
Y
be Banach spaces, let
{}X
nnÎN
and
{}Y
nnÎN
be sequences of their
finite-dimensional subspaces, and let
Q
and
Q
n
be linear operators acting from
X
into
Y
and from
X
n
into
Y
n
,
respectively. The equalities
Qx y=
and
Qx y
nn n
=
are considered as equations. Let the following conditions be satisfied:
— the operator
Q
is invertible;
— the quantity
e
()
|| ||
n
nY
n
QQº- ¾®¾¾
®¥
0
;
— for any
n
,
dim dimXYmn
nn
==<¥()
;
— the quantity
d
()
|| ||
n
nY
n
yyº- ¾®¾¾
®¥
0
.
Then, for all
n
satisfying the inequality
pQ QQ
nXnY
º-<
-
|| || || ||
1
1
, the equation
Qx y
nn n
=
has a unique
solution (denoted by
x
n
*
) with any right side and
|| || || || || ||
*
xQy
nX X nY
nnn
£
-1
and
|| ||
|| ||
()
Q
Q
p
X
X
n
n
-
-
£
-
1
1
1
.
The rate of convergence of an approximate solution to the exact one (we denote it by
x
*
) is estimated to be
a
a
n
Y
nX n X
Q
xx Q
|| ||
|| || || ||
**
£- £
-1
, where
a
n
º-+-|| ( ) ( ) ||
*
yy Q Qx
nn nY
and
|| ||
|| ||
(|| || || || )
**
xx
Q
p
yy p y
nX
X
n
nY n Y
-£
-
-+ =
-1
1
O
nn
()
() ()
ed+
.
The theorem formulated below follows from Theorem 9 and estimates (9), (12), (15), and (17).
THEOREM 10. Let
N
be the smallest among numbers
n
i
,
im=1,
. An approximate solution to a system of
hypersingular integral equations of the second kind with sufficiently large values of
N
is close to the exact solution, and
the following inequality holds:
|| ||uu
L
-£
-n
mc
N
2
I
, (20)
where
c
is a constant equal to the greatest among numbers
c
R
,
c
B
,
c
K
, and
c
f
.
401
Note that, with the help of inequality (20), the rate of convergence of linear functionals of an approximate solution
to their values for the exact solution can be estimated. The need for the computation of such functionals frequently arises
in solving applied problems of mathematical physics that are reduced to the considered system of boundary hypersingular
integral equations of the second kind.
MODEL PROBLEMS AND NUMERICAL CONVERGENCE OF THE METHOD
Let us consider the results of applying the proposed numerical method to the solution of model problems. The
comparison of the obtained approximate solutions with the exact ones allows one to estimate the numerical convergence
of the method. All the model problems described in the present article are constructed with the help of the method of
M. V. Keldysh and L. I. Sedov (the method of the Keldysh–Sedov function) [16] that makes it possible to execute exact
computations of singular integrals. The construction of model problems is also based on the relationship between singular
and hypersingular integrals [11].
Below, we present solutions of three model problems, namely, hy persingular integral equations of the second
kind that are given in the order of the complication of their form and increase in their closeness to applied problems.
All model equations include addends requiring regularization since they exert strong influence on the convergence of
the numerical method.
Problem 1. Let us consider the following model hypersingular integral equation of the second kind on the
interval
[,]-11
:
hu y y
ut
yt
tdt()
()
()
1
1
1
2
2
2
1
1
-+
-
-
-
ò
p
=-+-+-
-
hy y y y y y
y
y
sin sin cossh ch sh11 1
1
22 2
2
. (21)
The function
uy
yy
y
()
sin
=
-
-
sh 1
1
2
2
is the exact solution to Eq. (21). Denote by
uy
n-2
()
an approximate solution to
Eq. (21). Note that the function
uy()
is odd and real. The function
uy
n-2
()
is also odd,
tt
nj
n
j
n
00-
=-
,
jn=1,
.
Denote by
fy
1
()
the function in the right side of Eq. (21),
fy h y y y y
1
22
11() sin sin=-+-sh ch
+-
-
cos yy
y
y
sh 1
1
2
2
. Then, in operator representation, Eq. (21) assume the form
( )() ( )() ()Ru y Au y f y+=
1
. (22)
As has been noted earlier, the operator
R
transforms a polynomial into a function in general form, and the operator
A
transforms a polynomial into a polynomial and preserves its degree. In the present article, in the capacity of the
regularization of the operator
R
, the operator
R
n-2
(10) is used that preserves the degree of a polynomial and is close in
terms of the norm of the space
L
II
to the operator
R
according to inequality (11). Thus, the application of the numerical
method to the solution of model hypersingular equation (22) allows one to illustrate features of regularization.
Table 1 presents the results of computations that make it possible to illustrate the numerical convergence of the
proposed method by the example of Eq. (21). The computations were performed under the assumption that
hi=-01 03..
.
Since the functions
uy()
and
uy
n-2
()
are odd, the values of
j
vary from one to the integer part of
n /2
.
The data presented in Table 1 show that when values of the argument approach the end of the interval
[,]-11
, the
modulus of the error of the numerical method for
n = 9
and
n =16
is approximately 0.208. However, in the process of
receding from the end of the interval, the real part of the error along with its imaginary part approaches zero. In
particular, an approximate solution consists of three or four exact significant figures. The mean-square deviation of the
modulus of the difference between approximate and exact solutions was equal to 0.098 when
n = 9
and to 0.074 when
n =16
. Note that the function
uy
n-2
()
turned out to be complex, and the reason is that Eq. (21) includes the complex
parameter
h
, but the imaginary part of
uy
n-2
()
is close to zero and its real part is close to
uy()
.
402
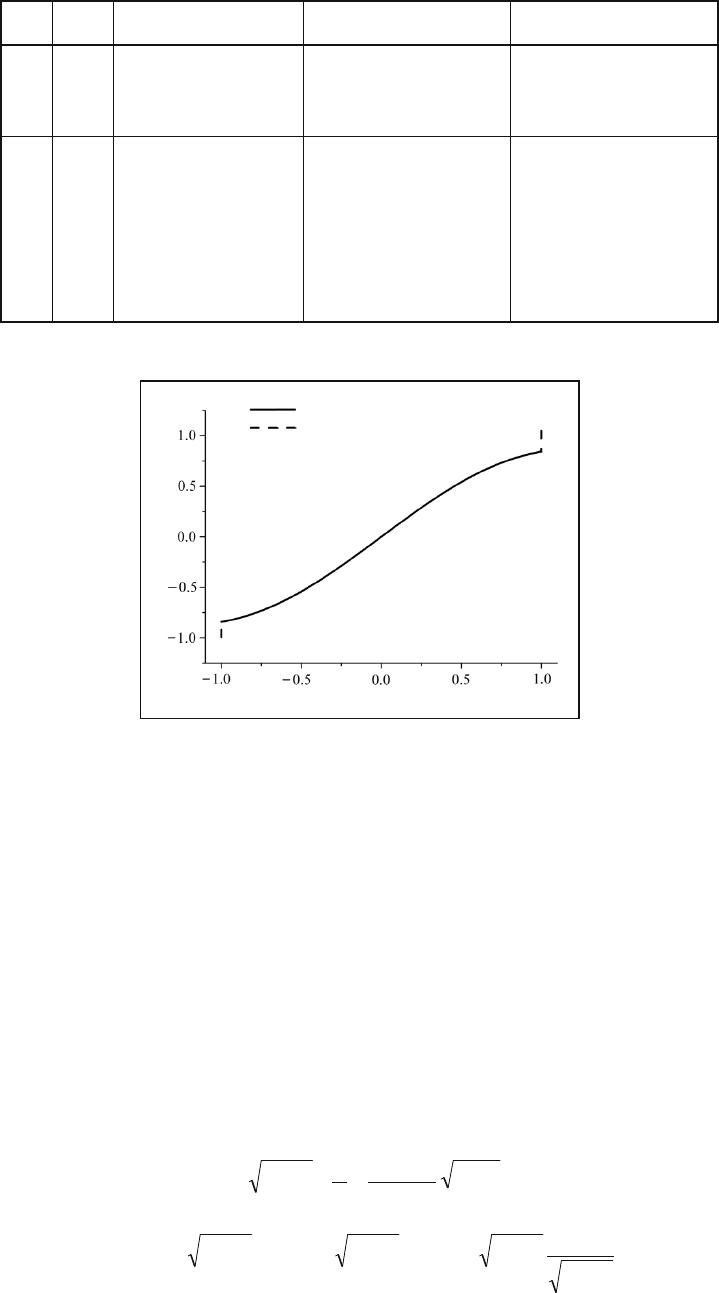
In Fig. 1, the plots of the functions
uy()
and
Re ( ( ))uy
n-2
are presented when
n =100
. As is easily seen, in the
middle of the interval
[,]-11
, the functions coincide with graphical accuracy; the number of exact significant figures in
the approximate solution in this region varies from three to seven. However, with approaching the end of the interval,
the real part of the error increases and its modulus remains equal to 0.208. The mean-square deviation of the modulus of
the difference between approximate and exact solutions equals 0.03 when
n =100
.
Thus, the results of application of the numerical method to the solution of model hypersingular integral
equation (21) of the second kind allow one to estimate and characterize the convergence of this method. In particular,
the convergence of the method is moderate and worsens with approaching the ends of the interval. Note that, in solving
applied problems of mathematical physics, for example, diffraction and wave scattering problems that lead to such
hypersingular integral equations, linear functionals of the solution of an integral equation should be constructed and
computed. This averages approximate solutions to a certain extent and provides average convergence that is rigorously
substantiated by inequality (20).
Problem 2. Consider now the following model hypersingular integral equation of the second kind on the
interval
[,]-11
:
hu y y
ut
yt
tdt()
()
()
1
1
1
2
2
2
1
1
-+
-
-
-
ò
p
=---+-
-
hy y y y y y
y
y
ch ch s hsin cos sin111
1
222
2
. (23)
403
TABLE 1
nj ut
j
n
()
0
ut
n
j
n
-2
0
() |() ()|ut u t
j
n
n
j
n
0
2
0
-
-
9
1 0.837359 1.045342
+
3.56
×
-
10
3
i
0.208
2 0.794899 0.809269
+
1.31
×
-
10
3
i
0.015
3 0.659800 0.665980
+
7.69
×
-
10
4
i
6.23
×
-
10
3
4 0.386976 0.388816
+
3.41
×
-
10
4
i
1.87
×
-
10
3
16
1 0.840203 1.048468
+
1.36
×
-
10
3
i
0.208
2 0.828962 0.845430
+
4.48
×
-
10
4
i
0.016
3 0.800871 0.808066
+
7.69
×
-
10
4
i
7.21
×
-
10
3
4 0.746084 0.749143
+
3.21
×
-
10
4
i
3.08
×
-
10
3
5 0.653504 0.655318
+
2.33
×
-
10
4
i
1.83
×
-
10
3
6 0.515333 0.516286
+
1.56
×
-
10
4
i
9.66
×
-
10
4
7 0.331954 0.332487
+
9.10
×
-
10
5
i
5.41
×
-
10
4
8 0.114833 0.114974
+
2.94
×
-
10
5
i
1.44
×
-
10
4
Fig. 1
y
uy()
Re ( ( ))uy
n- 2
Solutions to Eq. (21)
