EXTREME LEARNING MACHINE AND DEEP LEARNING NETWORKS
Hyperspectral image super-resolution using recursive densely
convolutional neural network with spatial constraint strategy
Jianwei Zhao
1,2
•
Taoye Huang
1
•
Zhenghua Zhou
1
Received: 29 January 2019 / Accepted: 29 August 2019
Ó Springer-Verlag London Ltd., part of Springer Nature 2019
Abstract
Hyperspectral images (HSIs) have been widely applied in real life, such as remote sensing, geological exploration, and so
on. Many deep networks have been proposed to raise the resolution of HSIs for their better applications. But training their
huge number of model parameters (weights and biases) needs more memory for storage and computation, which may bring
some difficulties when they are applied in mobile terminal devices. In order to condense the deep networks and still keep
the reconstruction effect, this paper proposes a compact deep network for HSI super-resolution (SR) by fusing the idea of
recursion, dense connection, and spatial constraint (SCT) strategy. We name this method as recursive densely convolu-
tional neural network with a spatial constraint strategy (SCT-RDCNN). The proposed method uses a novel designed
recursive densely convolutional neural network (RDCNN) to learn the mapping relation between the low-resolution (LR)
HSI and the high-resolution (HR) HSI and then adopts the SCT to improve the determined HR HSI. Compared with some
existing deep-network-based HSI SR methods, the proposed method can use much less parameters (weight and bias) to
attain or exceed the performance of methods with similar convolution layers because of the recursive structure and dense
connection. It is significant and meaningful for the practical applications of the network in HSI SR due to the limitations of
hardware devices. Some experiments on three HSI databases illustrate that our propos ed SCT-RDCNN method outper-
forms several state-of-the-art HSI SR methods.
Keywords Hyperspectral image Super-resolution Deep convolutional network Recursion Dense connection
1 Introduction
A hyperspectral image (HSI) is a series of images that
record the spectrum of scene radiance by a distribution of
intensity in a contiguous band over a certain ele ctromag-
netic spectrum. As HSI contains the spectral signatures of
different objects, it has played a vital role in numerous
applications, such as geological exploration [1 ], face
recognition [2], object segmentation [3], and so on.
Although HSI can achieve high spectral resolution, it
has severe limitations in spatial resolution when compared
against regular RGB (a.k.a. multispectral) camera s in vis-
ible spectrum. The reason is that hyperspectral imaging
systems need a large number of exposures to acquire many
bands simultaneously within a n arrow spectral window.
While sensors obey a working princi ple that the wider the
visual field is, the greater the cumulative energy reflects.
Therefore, whe n the spectral resolution is high, the spatial
resolution must be reduced to ensure enough energy for
imaging [4]. If people simply increase the resolution of the
imaging sensors, it will result in a lower signal-to-noise
ratio. The reason is that a less number of photons reach the
sensors [5]. Since super-resolution (SR) reconstruction
method acquires high-resolution (HR) image from one or a
series of low-resolution (LR) images by means of software
technique, it can enhance the spatial resolution without
compromising the existing devices. Therefore, people
& Jianwei Zhao
1
College of Sciences, China Jiliang University,
Hangzhou 310018, Zhejiang Province, People’s Republic of
China
2
State Key Laboratory for Novel Software Technology,
Nanjing University, Nanjing 210093, People’s Republic of
China
123
Neural Computing and Applications
https://doi.org/10.1007/s00521-019-04484-3
(0123456789().,-volV)(0123456789().,-volV)

begin to improve the spatial resolution of HSI by means of
SR reconstruction methods.
Up to now, many HSI SR methods have been proposed
to improve the resolutio n of HSIs. Some fusion methods
have been proposed for obtaining the HR HSI by com-
bining a LR HSI with a HR panchromatic image (covering
a large spectral window), such as linear transformations
(e.g., intensity-hue-saturation (IHS) transform [6], princi-
pal component analysis, wavelet transform [7–9]), unmix-
ing-based [10–12], and joint filtering [13]. Those
approaches, originally developed by the community of
remote sensing, have been known as pansharpening and
especially suitable for the case where the spectral-resolu-
tion difference between two input images is relatively
small. With the development of sparse representation the-
ory [14], some sparsity-based methods have also been
proposed for HSI SR. Zhao et al. [15] proposed sparse
representation and spectral regularization algorithm that
uses the sparse prior to enhance the spatial resolution.
Simoes et al. [16] used a regularized form based on vector
total variation to fuse LR HSI wi th HR multispectral
images to get HR HSI. Dong et al. [17] proposed a non-
negative structure sparse representation model that trans-
forms the HSI SR into a joint estimate of spectral basis and
sparse coefficients. However, most of these methods
tackled the HSI SR problem as an image fusion problem
using an auxiliary HR image. In the reality, it is very dif-
ficult to obtain a couple of HR panchromatic image and
HSI about the same scene with completely registration,
which makes this kind of method not so practical.
Recently, as convol ution neural network (CNN) can
extract the high-level features and explore the contextual
information, it has been widely applied in man y computer
vision fields, such as face reco gnition [18], visual recog-
nition [19], natural image super-resolution [20], and so on.
In the last two years, CNN has also been applied in the HSI
SR. Yuan et al. [21] transferred the CNN with three con-
volution layers in [22] to learn the mapping relationship
between LR and HR HSI images. But this method did not
consider the spectral information preservation and the
difference between HSI and RGB images. For this, Li et al.
[5] p roposed an HSI SR method by combining a deep
spectral difference convolutional neural network (SDCNN)
with a spatial constraint (SCT) strategy, denoted by SCT-
SDCNN method. It still uses the CNN as in paper [21] with
three convolution layers but to learn the spectra l difference
mapping between the LR HSI and HR HSI . Furthermore, it
applies SCT strategy to constrain the LR HSI generat ed by
the reconstructed HR HSI spatially close to the original LR
HSI. Subsequently, people begin to consider constructing
more complex deep networks for HSI SR inspired the work
done for natural image SR. For example, He et al. [23]
proposed an HSI SR method inspired by a deep Laplacian
pyramid network to enhance the spatial resolution with the
spectral information preserved . Then, a nonnegative dic-
tionary learning method is proposed for spectral informa-
tion reconstruction. These deep-network-based HSI SR
methods have good reconstruction effect because of the
outstanding performance of deep networks. What is more,
these methods do not need the auxiliary panchromatic
image and multispectral image of the same scene.
Generally speaking, for given training data, before the
network is over-fitted, the deeper the network is, the better
the reconstruction effect is. But increasing the depth of the
network will make the number of network parameters
(weight and bias) explode quickly. For example, even
highway network [24] with about 18 convolution layers for
the natural image SR, its number of parameters is about
1,000,000. Since HSI consists of many 2D images in dif-
ferent bands, which implies that HSI SR needs much more
model parameters than the natural image does. Therefore, it
will bring some troubles when it is applied in mobile ter-
minal devices. The reason is that when the depth of the
network increases, it needs not only more memory for
computation but also larger storage space. Of course, the
ordinary mobile terminal devices cannot satisfy the com-
puting requirement. Therefore, it is instructive to design a
deep network for HSI SR with less weights. Huang et al.
[25] proposed the idea of dense connection in DenseNet to
strengthen the feature propagation and encourage the fea-
ture reuse . It makes DenseNet use only a third of param-
eters in ResNet [
26] with the same effect. But DenseNet is
used to solve the classification problem, not even for nat-
ural image SR.
In this paper, we want to propose a compact deep net-
work for HSI SR with less model parameters. We adopt the
idea of dense connection in DenseNet [25] to construct a
dense block for the deep network. But in order to further
reduce the network parameters in DenseNet while keeping
the approximate performance, we fuse the recursion idea
[27] on dense connection to design a more compact deep
network for HSI SR. We call the network recursive densely
connected neural network (RDCNN). The proposed
RDCNN uses the recursion to share the weights and biases
in the dense bloc k for reducing the number of model
parameters. Furthermore, with the SCT strategy, the
reconstructed HR HSI by RDCNN can be improved fur-
thermore. We name this HSI SR method as recursive
densely convolutional neural network with a spatial con-
straint strategy (SCT-RDCNN). The proposed SCT-
RDCNN can learn the mapping relation between the LR
HSI and HR HSI directly instead of the band difference in
SCT-SDCNN. The way of dense connection in our pro-
posed RDCNN can not only extract the high-level featur e
and allevi ate the problem of gradient vanishing and
exploding, but also use less weights than the network
Neural Computing and Applications
123

without dense connection. What is more, the recursive
operation in our RDCNN can use much less weights and
biases than the deep network with the same convolution
layers, while keeping the similar performance.
The main contributions of this paper are summarized as
follows:
1. This paper designs a compact deep network, named
SCT-RDCNN, for HSI SR by fusing the idea of
recursion, dense connection, and a spatial constraint
strategy.
2. Compared with the existing deep-network-based HSI
SR methods, the proposed RDCNN in SCT-RDCNN
can use much less parameters (weight and bias)
because of the recursive structure and dense connection
. It is significant and meaningful for the practical
applications of the network in HSI SR due to the
limitations of hardware devi ces.
3. Experiments illustrate that the proposed SCT-RDCNN
can keep or exceed the accuracy of some state-of-the-
art deep networks for HSI SR with much less
parameters.
The remainder of this paper is organized as follows. Sec-
tion 2 describes the proposed SCT-RDCNN for HSI SR.
Section 3 carries out some comparison experiments of our
proposed SCT-RDCNN method with some other state- of-
the-art HSI SR methods. Lastly, the conclusions are given
in Sect. 4.
2 Proposed SCT-RDCNN for HSI SR
In this section, we give a description of the proposed SCT-
RDCNN for HSI SR in detail based on deep learning and
SCT strategy. The proposed SCT-RDCNN method designs
a novel RDCNN fusing the idea of recursion and dense
connection to get an HR HSI from the LR HSI and then
adopts the SCT strategy to further improve its reconstruc-
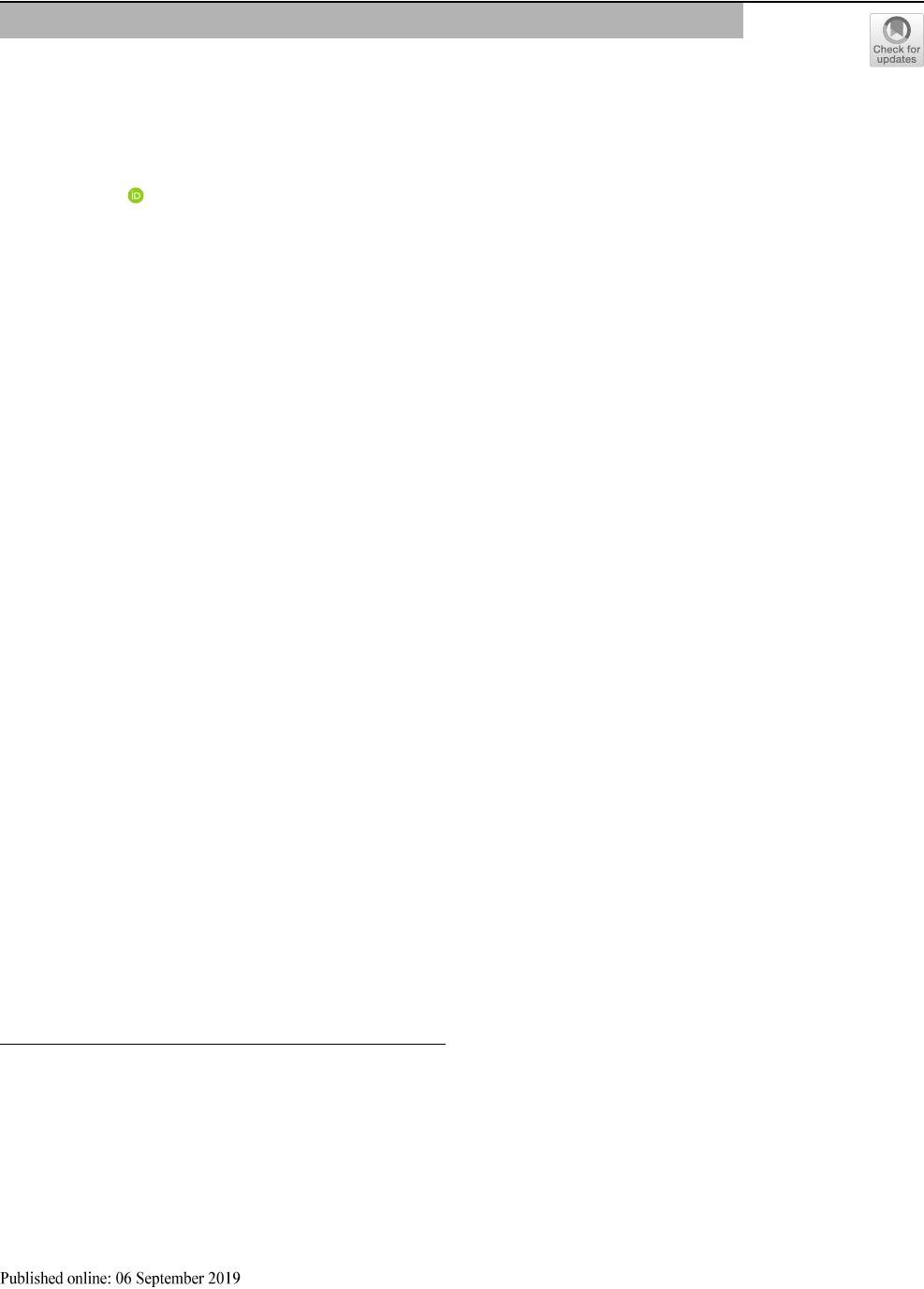
tion effect. The concrete structure diagram of our proposed
RDCNN is shown in Fig. 1, where RDCNN consists of
three main steps: initial feature extraction, recursive dense
block, and reconstruction. Figure 1a is the structure dia-
gram of our RDCNN with the folded form of the recursive,
and Fig. 1b is the corresponding structure diagram with the
unfolded form of the recursive with T times. In the fol-
lowing, we begin to explain the concrete process of our
SCT-RDCNN in detail.
2.1 Structure of RDCNN
In this subsection, we describe the structure of our pro-
posed RDCNN for HSI SR by fusing the recursion on
dense connection. In the process of designing the deep
network, we consider to reduce the model parameters
(weights and biases) by the idea of dense connection and
recursive operation. In the following, we explain the con-
crete structure of our RDCNN in three steps.
2.1.1 Initial Feature Extraction
The first step of our proposed RDCNN is the initial feature
extraction. For the given LR HSI X 2 R
whb
, where w, h,
and b are the width, height, and bandwidth of X, respec-
tively, it is firstly magnified r times with Bicubic. Here, we
note this up-sampled HSI as initial HR image
X
l
2 R
rwrhb
. Next we extract the feature map F
0
2
R
rwrhc
with the 3 3 convolution layer. Its process can
be d escribed in mathematics as:
F
0
¼ ReLUðW
0
X
l
þ B
0
Þ; ð2:1Þ
where W
0
2 R
33bc
are weights with c channels, B
0
2
R
rwrhc
are the biases that have same elements in each
channel, is the convolution operation as acting on the
RGB images, and ReLU is the operator that acts on each
element of matrices as
ReLUðxÞ¼maxf0; xg: ð2:2Þ
With the above initial feature extraction, we get an initial
HR HSI F
0
with low-level features.
2.1.2 Recursion with dense block
After getting the initial HR HSI F
0
, the next step is to
extract the high-level information by the proposed recur-
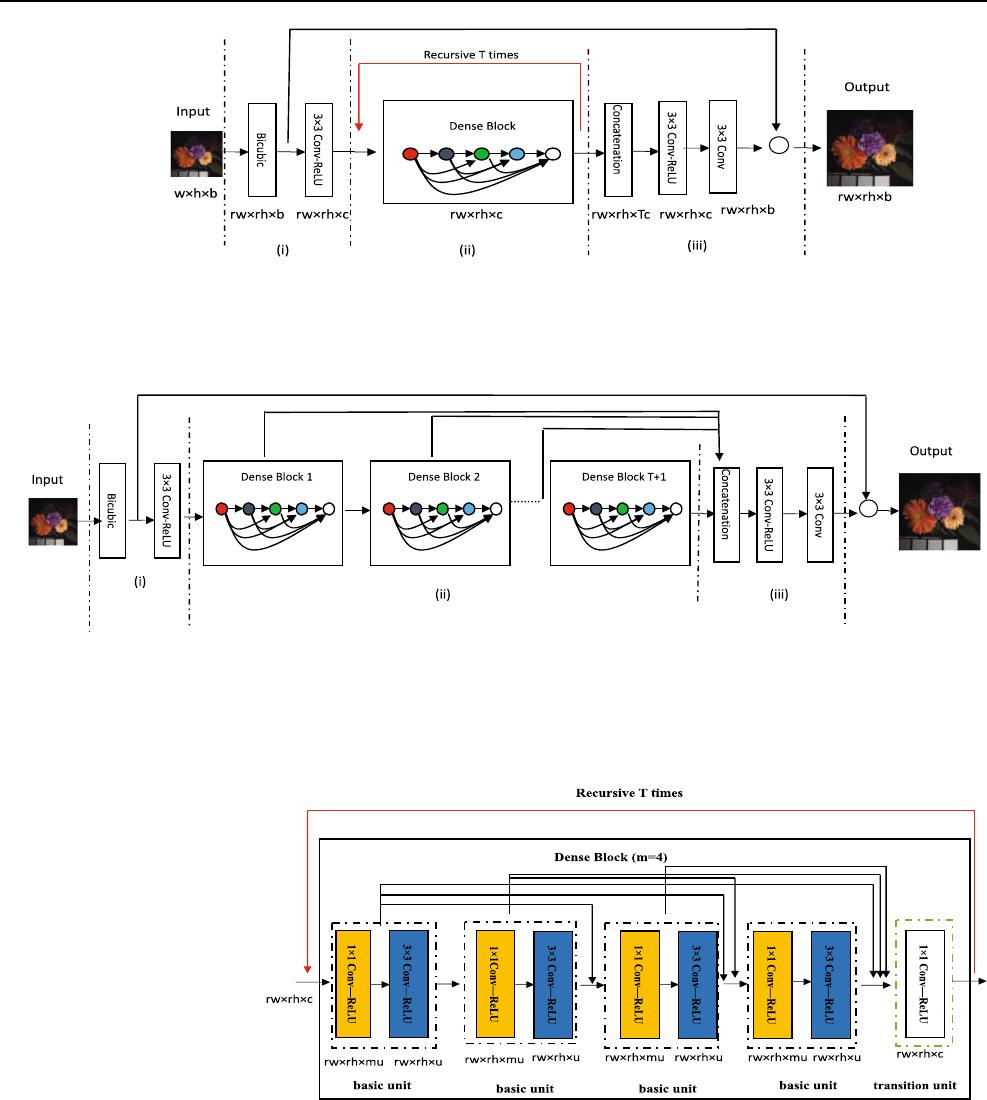
sive with dense block. As shown in Fig. 2, each dense
block in the proposed recursion contains mðm ¼ 4Þ basic
units and a transition unit, where the number m of basic
units can be chosen according to the appl ications. And each
basic unit consists of two convolution layers with different
kernels. The main structures of the proposed recursive
dense block are the dense connections in each dense block
and the recursive operation for the whole recursive model.
The step of dense connections in each dense block means
connecting the output of the early units to the later units,
which can make the network more compact and encourage
the features in different layers be reused fully. The step of
recursive operation means taking the output of the dense
block as the input of the dense block again, which makes
the dense block further extract the information by the same
weights and biases to save its storage space. Now we
explain the propos ed recursive dense block in two parts.
(1) Dense connection and units
In the block for recursive, we want to apply the idea of
dense connection in DenseNet [25] to improve the
Neural Computing and Applications
123
network’s performance. That is, we take some short con-
nections from the earlier units to the later units. Specifi-
cally, the input of the latter basic unit composes all the
outputs of the earlier basic units, and its output will also be
sent to the latter basic units. This connection can not only
strengthen the feature propagation and encourage the fea-
ture reuse, but also use less weights than the network
without dense connection. For example, the dense
connection makes DenseNet use only a third of parameters
in ResNet [26] with the same effect.
With the dense connection, we begin to explain the
concrete structures of basic unit and transit unit in detail.
Generally speak ing, many deep networks use one type
convolution layer as a basic unit. However, in our proposed
network, we take two convolution layers with size of 1 1
and 3 3 as the basic unit. The reas on is that as the
+
(a) Structure diagram of our proposed RDCNN with the folded form of the recursive,
where the numbers under modules denote the size of feature maps after above
module operation. (i) Initial feature extraction. (ii) Recursive dense block. (iii)
Reconstruction.
+
(b) Structure diagram of our proposed RDCNN with the unfolded form of the recursive with T times. (i) Initial feature
extraction. (ii) Unfolded form of the recursive with T dense blocks. (iii) Reconstruction.
Fig. 1 The concrete structure diagram of our proposed RDCNN. a The folded form of the recursive. b The unfolded form of the recursive with
T dense blocks
Fig. 2 Internal architecture of
each dense block with mðm ¼
4Þ basic units and a transition
unit for the proposed recursive.
Two convolution layers (Conv-
ReLU) with different kernels in
a black dotted line rectangle
compose a basic unit. The last
convolution layer in a green
dotted line rectangle composes a
transition unit. The numbers
under modules denote the size
of feature maps after the above
module operation (colour
figure online)
Neural Computing and Applications
123

number of units increases, the number of channels in the
input will become large due to the dense connections.
Inspired by the idea in [25], we take a 1 1 convolution
layer before 3 3 convolution layer to reduce the number
of channels firstly for improving the computational effi-
ciency. The output F
1
2 R
rwrhu
of the 1-st basic unit can
be represented as:
F
1
¼ ReLUðV
1
ðReLUðW
1
Y þ B
1
ÞÞ þ D
1
Þ; ð2:3Þ
where Y 2 R
rwrhc
is the input of the dense block, W
1
2
R
11cmu
and V
1
2 R
33muu
are weights of 1 1 con-
volution layer and 3 3 convolution layer, respectively,
B
1
2 R
rwrhmu
and D
1
2 R
rwrhu
are biases of 1 1
convolution layer and 3 3 convolution layer, respec-
tively, and u is the number of output channels of each basic
unit.
The output F
j
2 R
rwrhu
of the jth basic unit in the
dense block has the similar expression as that for the 1-st
basic unit in (2.3) except the size of weights in the 1 1
convolution layer. For convenience, we just state the dif-
ference of the weights in the 1 1 convolution layer. That
is, W
j
2 R
11ðj1Þumu
because of the dense connection,
here W
j
is the weight of 1 1 convolution layer in the jth
basic unit, j ¼ 2; 3; ...; m.
In the end of dense block, a transition unit is designed to
guarantee the implementation of the recursion. As shown in
Fig. 2, if there is no transition unit, the output of m basic
units will be sent to the dense block again. However, its
number of channels u may not be same with the number of
channels c for the input of the dense block. In order to
guarantee the implementation of the recursive, a transition
unit is added at the end of block to compres s the number of
channels. The transition unit consists of one 1 1 convo-
lution layer whose weights W
mþ1
2 R
11muc
and biases
B
mþ1
2 R
rwrhc
. Its process can be described in mathe-
matics as:
F
mþ1
¼ ReLUðW
mþ1
½F
1
; F
2
; ...; F
m
þB
mþ1
Þ; ð2:4Þ
where ½F
1
; F
2
; ...; F
m
is the concatenation of all the out-
puts of m basic units.
(2) Recursive operation
Generally, in order to achieve more effective perfor-
mance, people often deepen the network under a fixed
width, which results in the explosion of the number of
weights. In order to reduce the number of weights and keep
a good performance of deep network, the idea of recursive
operation is utilized. As shown in Fig. 2, the output of
dense block is not only sent to the part of reconstruction,
but also sent back to the dense block again. It can also be
seen in the unfolded form of the recu rsive in Fig. 1b, where
we give T times that the feature map s have passed through
the dense block. With the recursive operation, we can
deepen the network by largening T, while not increasing
the number of weights and biases because of sharing the
same weights and biases in the dense block. Hence, it is not
like the traditional feedforward deep networks that use
different weights in different convolution layers to improve
the network’s performance. In the meanwhile, the higher-
level features can still be extracted by the deep structure
constructed by the recursive operation. When T ¼ 0, the
feature maps will be sent to the subsequent reconstruction
network directly. That is, it is the general feedforward
dense network.
The recursive operation can be inferred by the following
mathematical formula:
K
iþ1
¼RðK
i
Þ; ð2:5Þ
where K
iþ1
2 R
rwrhc
is the output of the dense block
after i times recursive operation, i ¼ 0; 1; 2; ...; T, and R is
the complex nonlinear function of the whole dense block
which is described in Sect. 2.1.2(1) in detail.
2.1.3 Reconstruction
As shown in Fig. 1b, in order to take ful l advantage of
different-level features produced by each recursion, we
concatenate them together to form the input of the recon-
struction part, where ‘‘concatenation’’ means the operation
that puts all the outputs of each recursion together. It is
noted that the input of the reconstruction part contains
high-level features because it passes through T recursion of
dense block.
The reconstruction part of our proposed RDCNN con-
sists of two convolution layers with size 3 3. The first
3 3 convolution layer can fuse the feature information of
the input and sent out the feature maps with c channels for
the second convolution layer. The output X
h
2 R
rwrhb
of
the reconstruction part can be represented as:
X
h
¼
V ðReLUð
W ½K
1
; K
2
; ...; K
Tþ1
þ
BÞÞ þ
D;
ð2:6Þ
where ½K
1
; K
2
; ...; K
Tþ1
2R
rwrhðTþ1Þc
is the input of the
reconstruction part,
W 2 R
33ðTþ1Þcc
and
V 2 R
33cb
are weights of two convolution layers, respectively, and
B 2 R
rwrhc
and
D 2 R
rwrhb
are biases of two convo-
lution layers, respectively.
After the above two convolution operations, we get a
part of HR image that mainly contains the high-level fea-
ture information. Because the initial HR image X
l
magni-
fied by Bicubic is full of the low-level information, we take
a skip connection from the initial HR image X
l
to the
output of the reconstruction part X
h
, which is also the
residual idea of ResNet [26]. Then, their sum, X
l
þ X
h
,as
Neural Computing and Applications
123

shown in Fig. 1b, is taken as the final HR HSI
~
X. Owing to
the high correlation of low-level information and high-
level information, the skip connection can make the net-
work more effective.
2.2 Training
With a constructed RDCNN in Sect. 2.1, we begin to train
the network to determine the model parameters H ¼
fW
0
; W
1
; ...; W
mþ1
; V
1
; V
2
; ...; V
m
; B
0
; B
1
; ...; B
mþ1
;
D
1
; D
2
; ...; D
m
;
W;
V;
B;
Dg, where W
0
; W
1
; ...;
W
mþ1
; V
1
; ...; V
m
;
W;
V are the weights in different con-
volution layer, and B
0
; B
1
; ...; B
mþ1
; D
1
; D
2
; ...; D
m
;
B;
D
are the biases in different convolution layer. In the training
process of RDCNN, values of these parameters are ini-
tialized from a Gaussian distribution with zero mean and
the variance is 0.001. The optimum values of these
parameters are achieved through minimizing the loss
between the reconstructed HR HSI RDCNNðX
i
Þ and the
corresponding HR HSI Y
i
; i ¼ 1; 2; ...; n. Mean squared
error (MSE) is utilized as the loss function:
LðHÞ¼
1
n
X
n
i¼1
kRDCNNðX
i
ÞY
i
k
2
;
ð2:7Þ
where fðX
i
; Y
i
Þg
n
i¼1
are the set of training samples. The loss
LðHÞ is minimized by stochastic gradient descent (SGD)
with the back- propagation [ 28 ].
2.3 Enhancement by SCT strategy
After reconstructing an HR HSI from the LR HSI with the
proposed RDCNN, we want to enhance its reconstruction
effect further with the SCT strategy in [5].
The idea of SCT strategy is that if the reconstructed HR
image
~
Z is close to the real one, its LR image with the same
degradation process will be clos e to the original LR image
X. Its objective function can be described as:
~
Z ¼ arg min
Z
Z G #X
kk
2
F
;
ð2:8Þ
where Z is a reconstructed HR image, G is the blurry
kernel, is the convolution operation, ‘‘#’’ is the down-
sampling operation, and X is the original LR HSI image.
Since the blur operation and downsampling operation
can be completely offset by the corresponding inverse
operation, the gradient descent for the above objective
function (2.8) is:
oE
oZ
¼ 2 ðZ GÞ#XðÞ"G;
ð2:9Þ
where ‘‘"’’ is the upsampling operation and is the deblur
operation.
Take the reconstructed HR HSI with the RDCNN as the
initial value, i.e., Z
0
¼
~
X, then the iterative formula for
(2.8) can be given as follows:
Z
t
¼ Z
t1
sððZ
t1
GÞ#XÞ"G;
ð2:10Þ
where t denotes the number of iterations and s is the
learning step. Af ter q iterations, Z
q
is the final recon-
structed HR HSI.
We name the HSI SR method that consists of RDCNN
and SCT strategy as SCT-RDCNN.
3 Experimental results
In this section, we will carry out some comparison exper-
iments on three benchmark datasets to demonstrate the
better performance of our proposed SCT-RDCNN than
some other state-of-the-art HSI SR methods.
All of our experiments are carried our in TensorFlow
1.6.0 version running in Intel
r
Xeon
r
E5-1620 v3 pro-
cessor with the speed of 3.50 GHz, four kernels, memory
of 32 GB, Windows 10.
3.1 Datasets
CAVE database [29] CAVE database contains many image
subdatabases for different tasks. Here, we select Mul-
tispectral Image Database for HSI super-resolution com-
parison experiments. This subdatabase consists of 32 scene
images containing a wide variety of real-world materials
and objects. The spatial size of all images is 512 512,
and the wavelength of images ranges from 400 to 700 nm
in a step of 10 nm (31 bands total).
Foster database [30] For the Foster database, we choose
the subdatabase: Hyperspectral Images of Natural Scenes
2002 for the comparison experiment. The subdatabase
contains 4 urban scenes from Porto and Braga and 4 rural
scenes from Minho in Portugal with different image size.
The wavelength of images ranges from 400 to 700 nm in a
step of 10 nm (31 bands total).
Harvard database [31] The Harvar d database provides
50 outdoor scenes and 27 indoor scenes HSIs. The spatial
size of these images is 1040 1392, and the wavelength of
images ranges from 420 to 720 nm in a step of 10 nm (31
bands total).
In this paper, we choose two HSI images from each
datasets for the testing and the remaining images for the
training as mentioned in [5]. In order to provide an eye-
appealing exhibition about the HSI, we create a RGB
image for each HSI by averaging the 1-st band to the 11-th
band as the B channel, the 11-th band to the 21-st band as
the G channel, and the 21-st band to the 31-st band as the
Neural Computing and Applications
123
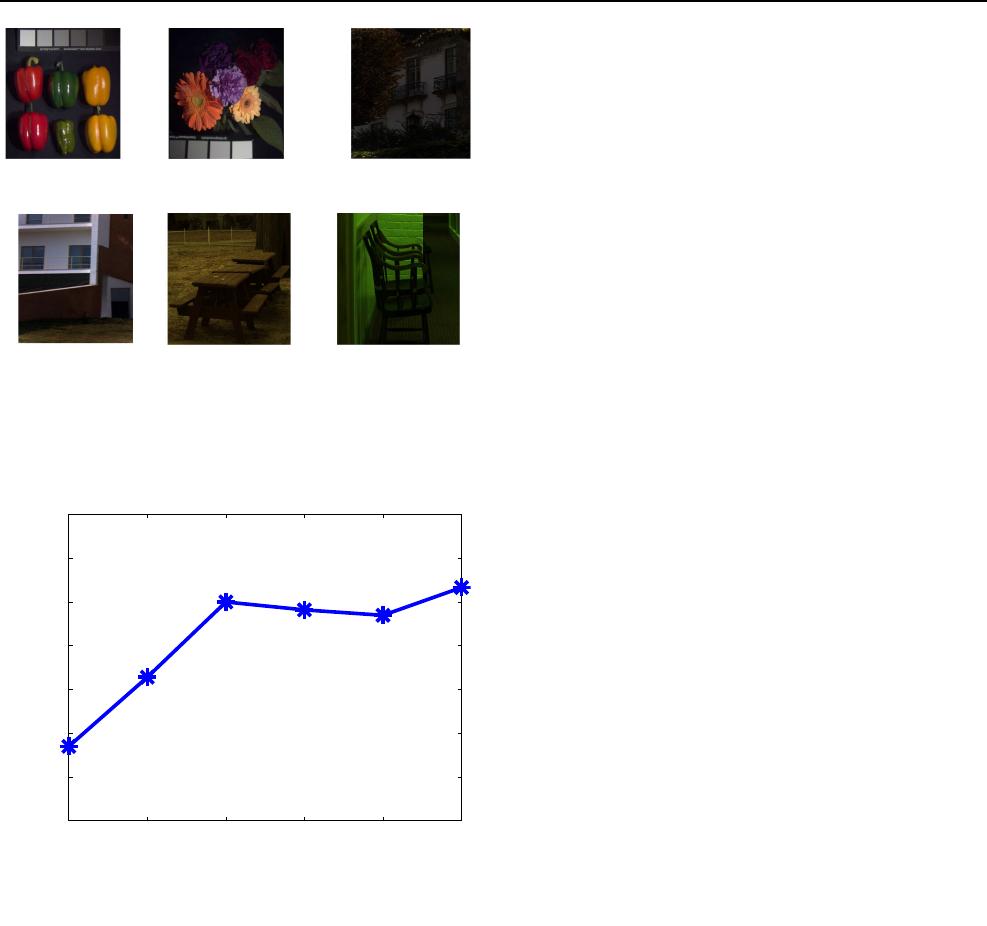
R channel. Then, the corresponding RGB images for the
selected testing HSIs are shown in Fig. 3.
For constructing the training images for our networks,
we take the selected HSIs from databases as the HR ima-
ges, and the corresponding LR images are generated by the
following degenerative process: (1) blur with Gaussian
filter; (2) down-sample with the scaling factor; (3) add
zero-mean Gaussian noise. Before inputting the LR images
into the network, in order to avoid the influence of different
ranges of data values, and improve the training speed of the
networks, both the LR and HR images are normalized.
3.2 Evaluation of RDCNN
The key points in our proposed RDCNN are the recursive
structure and dense connection, which is different from
most deep-network-based HSI SR methods. In this sub-
section, we want to carry out some comparison experi-
ments on RDCNN to explain the significance of these
structures. In the meanwhile, our RDCNN has several key
parameters related to the network structure and perfor-
mance: the recursive time T, the number of basic units m in
a dense recursive block, the number of output channels u of
each basic unit, and the number of output channels c of the
initial feature maps in F
0
or transit unit. Therefore, we
design some experiments on these parameters to show the
performances of our propos ed RDCNN.
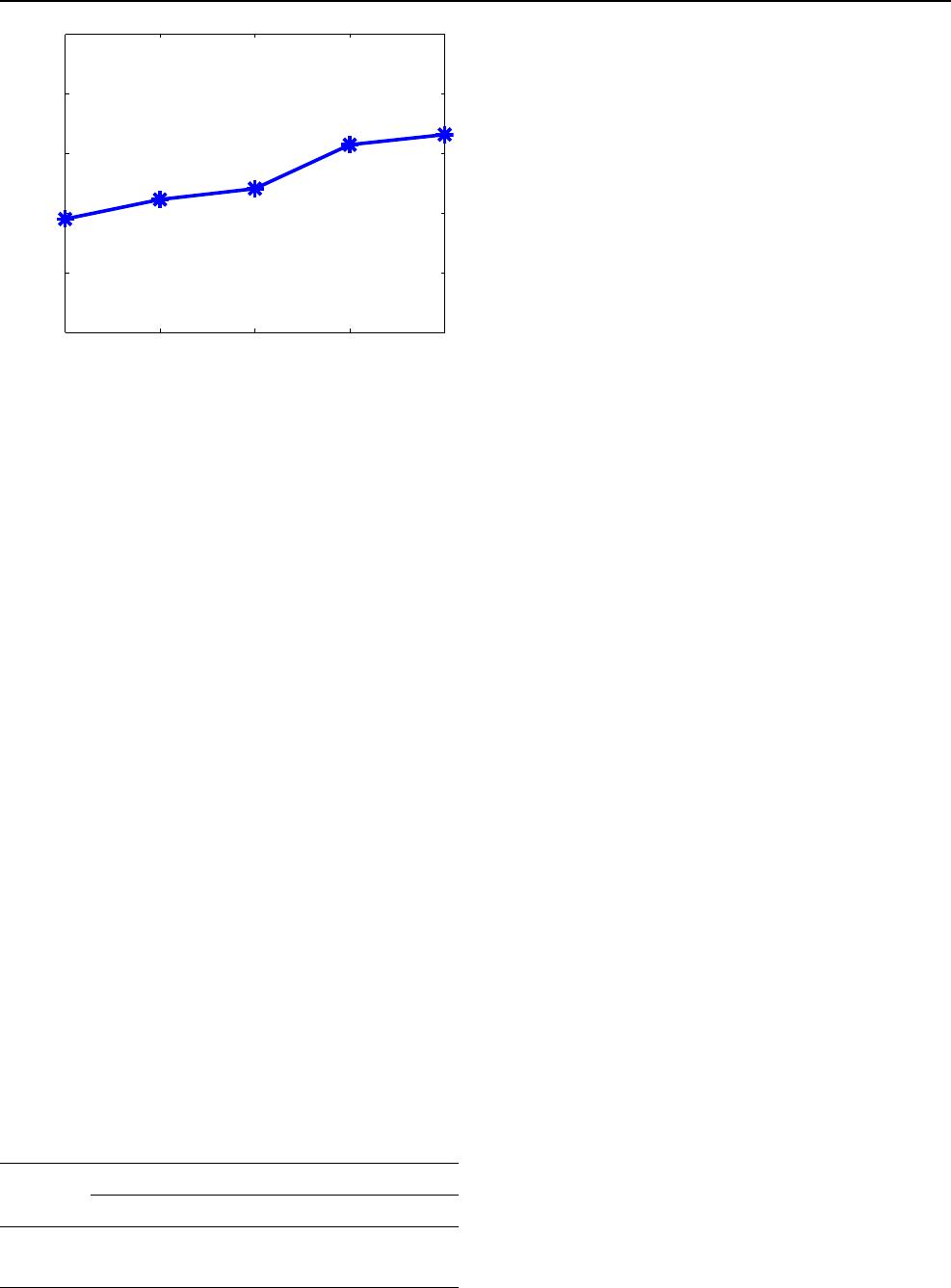
3.2.1 Impact of the recursive time T
In this experiment, we wan t to illustrate the impact of the
recursive times T on the performance of our proposed
RDCNN. The other parameters are taken as follows: the
number of basic units in a dense recursive block m ¼ 5, the
number of output channels of the basic unit u ¼ 12, and the
number of output channels of the transit unit c ¼ 12 by
experience. Then, the average peak signal-to-noise ratio
(PSNR) (dB) of the reconstructed HSI by RDCNN on 6
testing images varying with the recursive time T is shown
in Fig. 4.
As observed from Fig. 4, when T increases from 1 to 3,
the average PSNR of 6 testing images also increases. But
when T is greater than 3, average PSNR began to fluctuate.
The reason is that the size of T is equivalent to the depth of
the network. The reason is that when T increases, the
network is deepened. Generally, the deepening of network
will improve the network’s learning ability. Therefore, the
average PSNR will increase from T = 1 to 3. But dense
blocks in our RDCNN share the common weights and
biases to extract the features, so it is impossible to increase
learning ability infinitely. Since the aver age PSNR of the 6
testing images is basically same when T starts from 3, we
determine T ¼ 3 considering the minimum amount of
calculation.
3.2.2 Impact of the number of basic units
In this experiment, we wan t to illustrate the impact of the
number of basic units m in the dense block in our RDCNN.
Here, we take the recursive times T ¼ 3, u ¼ 12, and c ¼
12 as explained in Sect. 3.2.1. Then, the average PSNR
(dB) of the reconstructed HSIs by RDCNN on 6 testing
images varying with the number of basic units m is shown
in Fig. 5.
(a) Peppers (b) Flowers (c) Scenes6
(d) Scenes7 (e) Imgb0 (f) Imgg1
Fig. 3 The RGB images for the selected testing HSIs from three
different databases. a Flowers and b Peppers from CAVE database,
c Scenes6 and d Scenes7 from Foster database, and e Imgb0 and
f imgg1 from Harvard database
1 2 3 4 5 6
41.5
41.6
41.7
41.8
41.9
42
42.1
42.2
Recursive Times
Average PSNR of test images(dB)
Fig. 4 The average PSNR (dB) of the reconstructed HSIs by RDCNN
on 6 testing images varying with the recursive time T
Neural Computing and Applications
123
As observed from Fig. 5, the average PSNR of the
reconstructed HSIs increases when the number of basic
units m increases. Generally, both m and T are considered
as the parameters that determ ine the depth of the network.
The difference between m and T is that increment of m is
equivalent to adding convolution layers with different
weights. Since the total number of convolution layers in
our RDCNN is not very large, the learning ability of net-
work will continue to increase as the depth increases. That
is, the average PSNR in Fig. 5 for the reconstructed HSIs
will go up. A larger m may result in a better result, but
considering the cost of computation, we take m ¼ 9 in the
subsequent experiments.
3.2.3 Impact of the number of channels u and c
In this experiment, we wan t to illustrate the impact of the
number of the output channels u of the basic unit and the
number of output channels c of the initial feature maps or
transit unit in the dense block in our RDCNN. Here, we
take the recursive times T ¼ 3 and the number of basic
units m ¼ 9 as explained in Sects. 3.2.1 and 3.2.2,
respectively. Table 1 shows the average PSNR of our
proposed RDCNN on 6 testing images with varying u and
c.
As shown in Table 1, with the fixed number of the
output channels u of the basic unit, when the number of
output channels c of the initial feature maps or transit unit
increases, the average PSNR (dB) of the reco nstructed
HSIs by RDCNN on 6 testing images increases firstly and
then fluctuates. With the fixed number of output channels c
of the initial feature maps or transit unit, except the case
c ¼ 12, when the number of the output channels u of the
basic unit is larger, the average PSNR (dB) of the recon-
structed HSIs by RDCNN on 6 testing images becomes
better. Generally, both u and c are related to the width of
the network. When the numbers of channels u and c
increase, the network performance will be improved
because of the widened network structure. Fo r the case
c ¼ 12, the performance of our RDCNN becomes worse.
The reason is that the information extracted by the initial
feature extraction is not rich enough, and it is difficult to
support the recursive dense block with stronger learning
ability to further extract features. Therefore, u and
c need a
suitable combination. Considering the number of weights
and biases and the effect of our network, we choose u ¼ 24
and c ¼ 24.
3.3 Reconstruction comparison of our method
with others
In this subsection, we compare our proposed RDCNN and
SCT-RDCNN with some other HSI SR methods: Bicubic,
SNNMF [32], CNMF [33], HySure [16], NSSR [17], and
SCT-SDCNN [5]. We take the root mean square error
(RMSE), structural similarity (SSIM), and PSNR as the
evaluation criterion. For the methods that require the
auxiliary image (e.g., multispectral images) to assist the
reconstruction, we utilize the approach of generating RGB
images in Sect. 3.1 as the alternative. The comparison
results of the average PSNR, RMSE, and SSIM of our
proposed RDCNN, SCT-RDCNN, and some other HSI SR
methods under different magnification times r on the
reconstructed 6 HSIs are shown in Table 2.
As observed from Table 2, our proposed RDCNN, SCT-
RDCNN methods and SCT-SDCNN [5] have better per-
formances than the other HSI SR methods. The reason is
that our proposed RDCNN, SCT-RDCNN methods and
SCT-SDCNN [5] are based on deep networks that have
strong feature representation ability. What is more, our
proposed RDCNN performs better than SCT-SDCNN [5]
except the case r ¼ 3, where the PSNR and RMSE are
worse than those of SCT-SDCNN [5]. The reason is that
the SCT strategy acts an important role in the reconstruc-
tion results when the magnification times r is not large.
However, when we also adopt the SCT strategy on our
5 6 7 8 9
41.8
41.9
42
42.1
42.2
42.3
The number of basic unit in recursive dense block
Average PSNR of test images(dB)
Fig. 5 The average PSNR (dB) of the reconstructed HSIs by RDCNN
on 6 testing images varying with the number of basic units m in a
recursive dense block
Table 1 The average PSNR (dB) of our proposed RDCNN on 6
testing images with varying number of the output channels u of the
basic unit and the number of output channels c of the initial feature
maps or transit unit
uc
12 24 36 48
12 42.11 42.15 42.19 41.92
24 37.21 42.31 42.31 42.29
Neural Computing and Applications
123
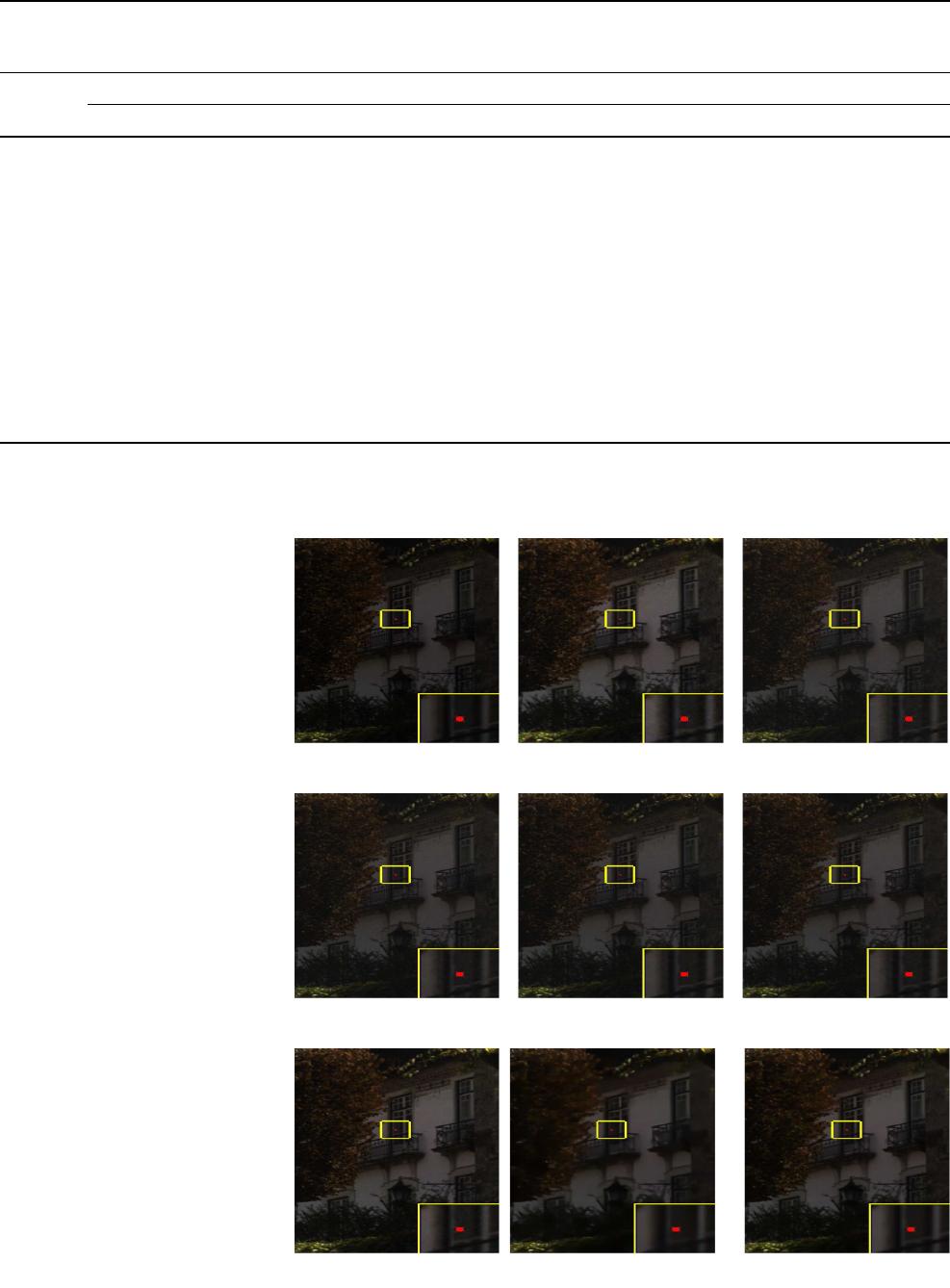
(a) Original (b) Bicubic (c) SNNMF
(d) CNMF (e) HySure (f) NSSR
(g) SCT-SDCNN (h) RDCNN (i) SCT-RDCNN
Fig. 6 Visual comparison of
reconstructed high-resolution
hyperspectral images for
‘‘scene6’’ image with different
methods
Table 2 Comparison of the average PSNR, RMSE, and SSIM of the reconstructed HSIs on 6 images by our proposed RDCNN, SCT-RDCNN,
and some other HSI super-resolution methods under different scales
Scales Methods
Bicubic SNNMF [32] CNMF [33] HySure [16] NSSR [17] SCT-SDCNN [5] RDCNN SCT-RDCNN
2
PSNR 37.19 36.95 37.62 37.97 38.02 41.03 42.33 44.30
RMSE 0.0140 0.0143 0.0132 0.0127 0.0126 0.0092 0.0082 0.0064
SSIM 0.8267 0.8752 0.8838 0.8979 0.9011 0.9192 0.9597 0.9827
3
PSNR 35.48 36.32 36.54 36.97 37.03 39.15 39.05 41.30
RMSE 0.0172 0.0151 0.0143 0.0129 0.0125 0.0117 0.0118 0.0091
SSIM 0.8184 0.8225 0.8530 0.8889 0.8861 0.9040 0.9375 0.9673
4
PSNR 35.43 35.39 36.32 36.75 36.79 37.97 38.46 40.17
RMSE 0.0174 0.0170 0.0153 0.0145 0.0145 0.0131 0.0128 0.0105
SSIM 0.8173 0.8112 0.8379 0.8573 0.8586 0.8992 0.9267 0.9557
Neural Computing and Applications
123
RDCNN, our proposed SCT-RDCNN can improve almost
2 on PSNR, 0.03 on SSIM, and 0.002 on RMSE than our
RDCNN does. Then, the PSNR and RMSE of our proposed
SCT-RDCNN are better than those of SCT-SDCNN [5]. In
summary, our proposed SCT-RDCNN outperforms better
than all the HSI SR methods in Table 2.
In order to give a visual feel of those HSI SR methods in
Table 2, we exhibit the reconstruction image of the image
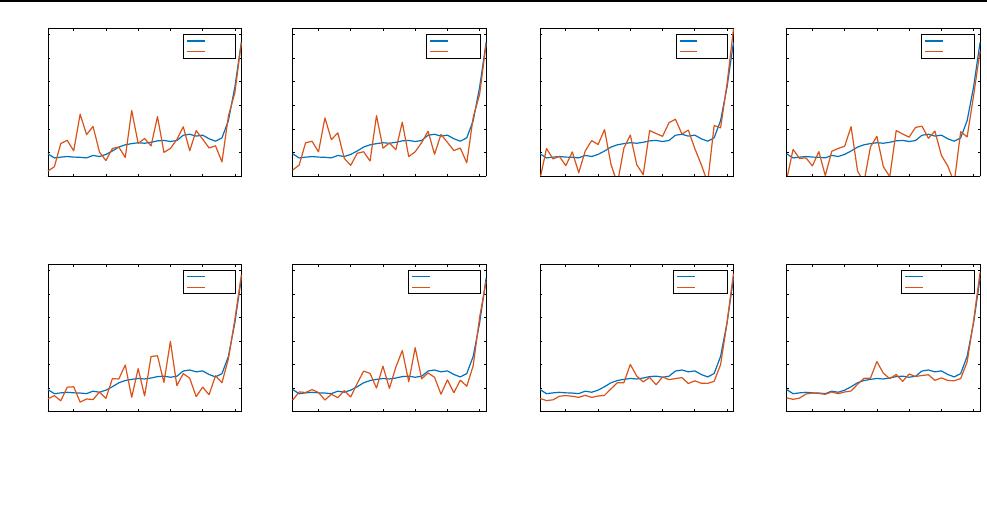
‘‘scene6’’ from Harvard database in Fig. 6. Furthermore,
the spectral curves of the red pixel by different recon-
struction methods in Fig. 6 are shown in Fig. 7.
As observed from the local enlarged patches in Fig. 6,
our proposed SCT-RDCNN can reconstruct the HR HSI
closer to the original HSI than the other methods. In the
meanwhile, Fig. 7 shows that the spectral curves of the red
pixel reconstructed by our RDC NN and SCT-RDCNN are
closer to the curve of the red pixel in the original HSI than
other methods do.
4 Conclusion
In this paper , an efficient hyperspectral image (HSI) super-
resolution method has been proposed based on a proposed
recursive densely convolutional neural network (RDCNN)
and the spatial constraint (SCT) strategy, denoted by SCT-
RDCNN method. The proposed RDCNN that fuses the idea
of dense connection and recursion is designed to learn the
mapping relation between the low-resolution (LR) HSI and
the high-resolution (HR) HSI directly. The way of dense
connection in our proposed RDCNN can not only extract
the high-level feature and alleviate the problem of gradient
vanishing and exploding, but also use less weights than the
network without dense connection. In the meanwhile, the
recursive operation in our RDCN N can use muc h less
weights and biases than the deep network with the same
convolution layers because of the shared weights and bia-
ses, while keeping the similar performance. Based on the
good performance of RDCNN, the spatial constraint (SCT)
strategy is used to enhance the effect of reconstructed HR
HSI. Some experiments on three databases illustrate that
our proposed SCT-RDCNN method outperforms several
state-of-the-art HSI SR methods.
Acknowledgements This work was funded by the National Natural
Science Foundation of China (61571410) and the Zhejiang Provincial
Nature Science Foundation of China (LY18F020018 and
LSY19F020001).
Compliance with ethical standards
Conflict of interest The authors declare that they have no conflict of
interest.
Research involving human participants and/or animals This study did
not involve human participants and animals.
Informed consent The all authors of this paper have consented to the
submission.
References
1. Asadzadeh S, de Souza CR (2016) A review on spectral pro-
cessing methods for geological remote sensing. Int J Appl Earth
Obs Geoinform 47:69–90
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
bicubic
(a) Bicubic
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
SNNMF
(b) SNNMF
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
CNMF
(c) CNMF
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
HySure
(d) HySure
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
NSSR
(e) NNSR
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
SCT_SDCNN
(f) SCT-SDCNN
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
RDCNN
(g) Our RDCNN
5 1015202530
band number
0
0.02
0.04
0.06
0.08
0.1
0.12
value
original
SCT_RDCNN
(h) Our SCT-RDCNN
Fig. 7 Comparison of the spectral curves of the red pixel in Fig. 6 reconstructed by different methods
Neural Computing and Applications
123
